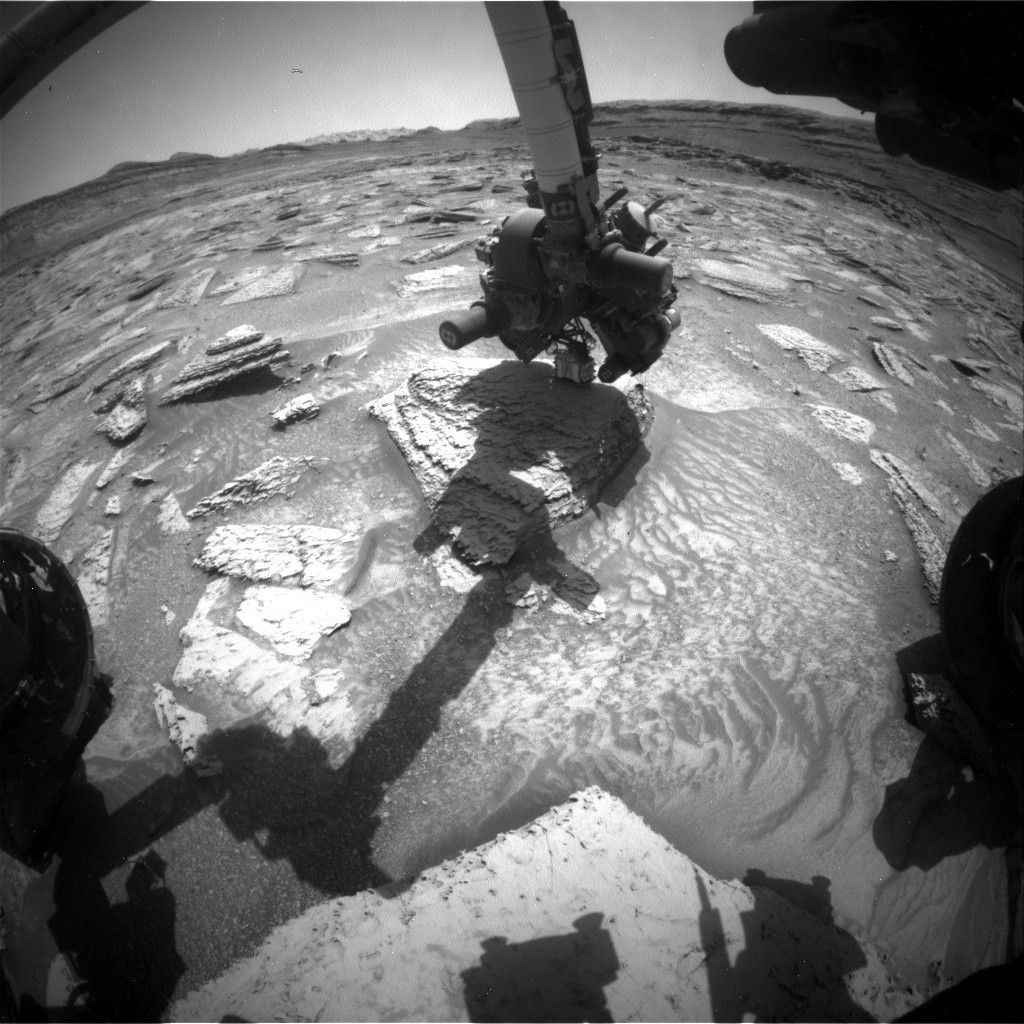




















Today we planned some MAHLI imaging along the contact near the "Missoula" target (the ledge in the upper left portion of this Navcam image ). We refer to it as a dog’s eye mosaic, meaning that we use the MAHLI camera to take a series of images along a vertical face – essentially sticking our nose in there to get a good view. Hopefully it will provide a good perspective on the contact between the Stimson and Pahrump units! The plan also includes several ChemCam observations along the contact, at targets named "Selow," "Clark," and ldquo;Wapiti." We planned these as vertical transects to characterize any changes in chemistry from the Pahrump unit into the Stimson unit. We’ll also acquire ChemCam data on the target "Seeley" – a broken rock that exposes a fresh surface. Then we’ll take a Mastcam mosaic to capture the contact and some of the surrounding veins. Ken Herkenhoff and I were both on duty again today, so it was fun planning here at the USGS. We put together a really full plan to handover for Sol 1032, so we’re looking forward to some more exciting contact science tomorrow! By Lauren Edgar
--Lauren is a Research Geologist at the USGS Astrogeology Science Center and a member of MSL science team.
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Written by Lauren Edgar, Planetary Geologist at USGS Astrogeology Science Center