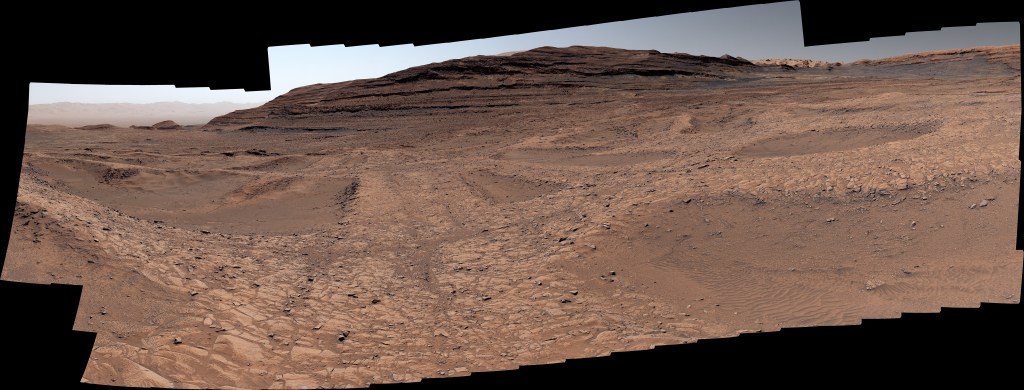














Curiosity has been picking her way through sand, sharp boulders and ridges to find a way up onto the Greenheugh pediment. We briefly explored the pediment more than 600 sols ago, before resuming our traverse over the Mount Sharp group sedimentary rocks that we have been driving over since ~sol 750. The science team is excited to drive up onto and investigate the very different looking rock that comprises the more resistant pediment again. As we have been driving along the side of the pediment cliffs, interesting textures have been observed, which we are hoping to examine in situ. However, we are not quite there yet. Because of the tricky terrain, Curiosity’s weekend drive stopped a little short of its intended location and she ended up perched on a rock, such that we were not able to safely deploy the arm and use either MAHLI or APXS. However, the rover engineers are confident that we can continue our drive in this plan to get us ever closer to the pediment surface.
Without the use of the arm in this plan, the science team set about planning how to utilize the remaining instruments to continue characterizing this important transitional area. ChemCam will analyze a small resistant ridge and associated bedrock (“Vert Knap of Howar”) with its laser, acquire passive spectra on the bedrock target “River Oykell,” and RMIs of the convoluted layering in the “Drumeizer” bedrock as well as of the blocky, Gediz Vallis ridge in the distance. Mastcam will also image the Vert Knap of Howar target, as well as the “Lamington Sandstone” and “Broch of Gurness” targets to document textures and stratigraphy within the cap rock.
The environmental scientists planned several observations to continue monitoring changes in atmospheric conditions. These included: Mastcam basic and full tau observations and a dust devil movie, and a Navcam dust devil movie and images as well as a supra horizon movie.
After our hopefully successful drive, we will execute a ChemCam AEGIS analysis to autonomously measure the chemistry of a rock target in the new workspace. The terrain beneath the rover wheels will be imaged with MARDI. Standard REMS, DAN and RAD activities round out this plan.
Written by Lucy Thompson, Planetary Geologist at University of New Brunswick






