Earth planning date: Monday, December 18, 2023
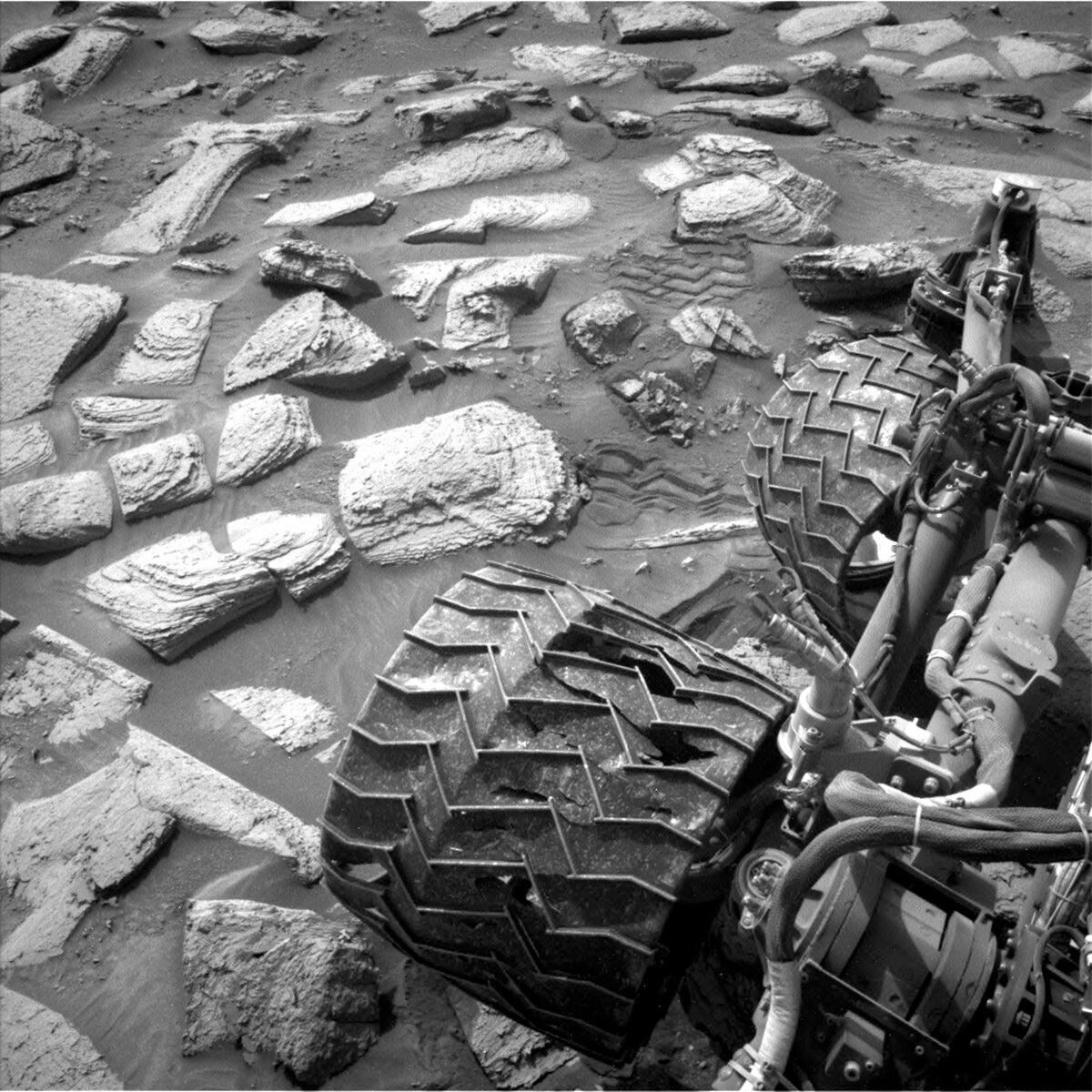
On the 4040 sol of Marsmas my downlink gave to me, a faulted drive and a wheelie! That’s right, folks, we’re popping Christmas-sized wheelies this year, bigger than we’ve ever seen before! It’s a little hard to tell from the Navcam perspective, but the cover photo above shows our right-middle wheel (bottom in image) completely off the ground in suspension. You can see why, too, with all the thick and pointy rocks everywhere. But don't worry, our rocker-bogie wheel suspension system allows us to pop wheelies without too much concern over rover stability. Even in extreme cases like this, getting us into a more stable position for continuing on is mostly a procedure of backing up, turning a bit to change headings, and continuing forward with lots of care (aka commanding strict limits on how far the rover can stray from the planned path). The biggest downside to mobility faults from wheelies is the inability to unstow the arm, which was the case we found ourselves in this morning.
While we were unable to use any arm instruments today, we took advantage of the free time and planned an excess of remote science instead. Today my job was commanding the Mastcams, so this was a pretty busy plan for me! As soon as we found out about the wheelie, my team basically told me to expand all our mosaic ideas as much as I could handle. Thankfully I got plenty of sleep last night, so I was able to sequence 125 high-resolution frames that will help us plan future contact science sites and drive locations (as well as serving many on-going stratigraphic and sedimentology studies). ChemCam is also allowed with the arm stowed, so they planned a whopping four RMI mosaics as well as two LIBS targets. And since there was even more time available, our environmental team planned a large dust devil movie with Navcam before driving away.
Plans like this can be exciting when you work on a mast-mounted instrument like me, but they ultimately mean less APXS and MAHLI data in the short term. We’ll try again to plant all our wheels on the ground for Wednesday planning, but until then the rover will be using its many eyes quite a bit. Hear that, Mars? We image you when you’re sleeping, we image when you’re awake, we assess if you’ve been bad or good so be good for goodness sake! If only we could ship coal to Mars. Merry Marsmas to all, and to all some hematite.
Written by Natalie Moore, Mission Operations Specialist at Malin Space Science Systems