











The highlight of the Sol 24 plan is to test some of the software that willallow the rover to avoid obstacles automatically.
The highlight of the Sol 24 plan is to test some of the software that will
allow the rover to avoid obstacles automatically. If the test, involving
taking images and processing them onboard the rover, is successful the
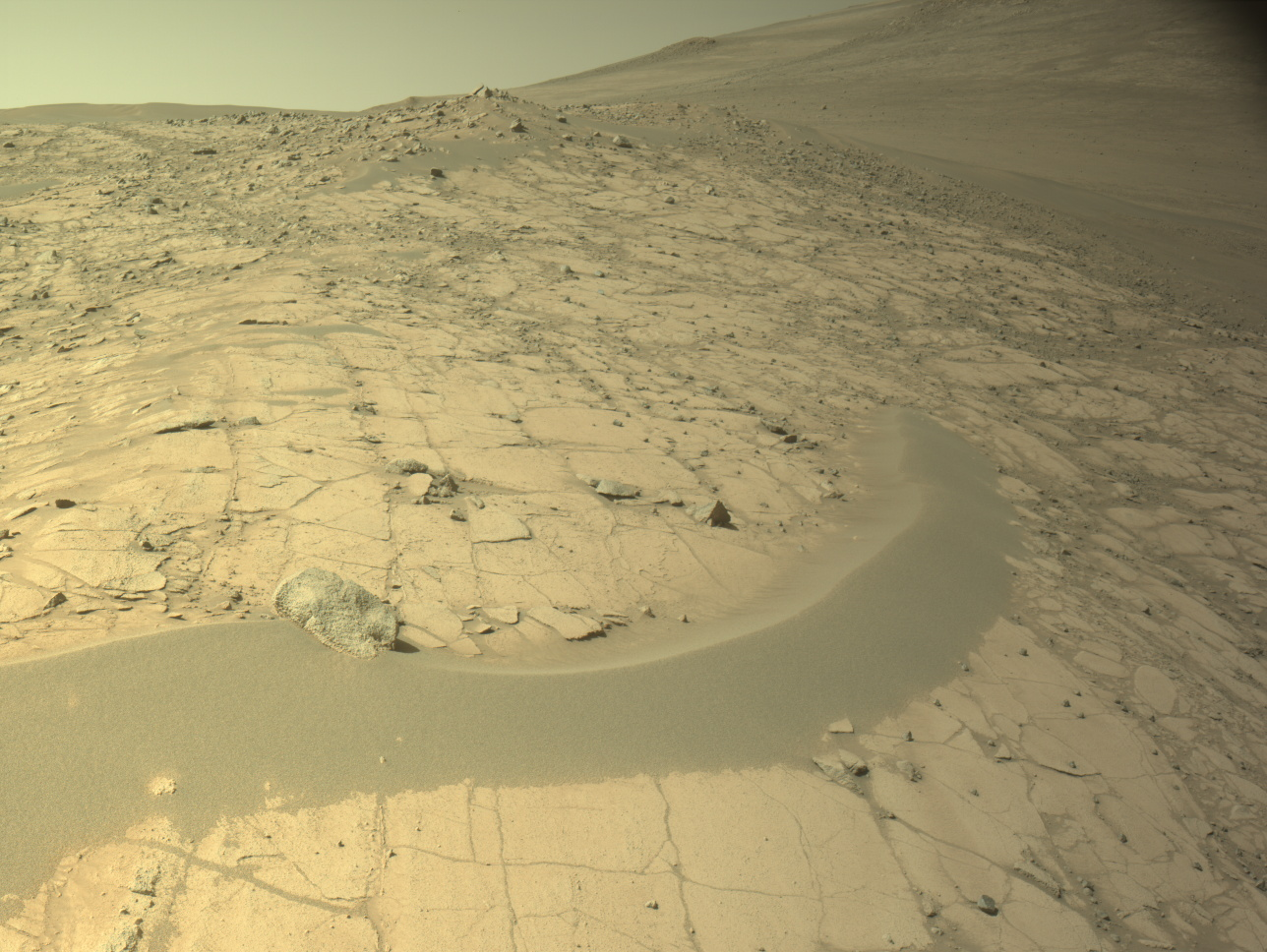
rover will drive farther toward our goal, called Glenelg. This location
will have a good view of the intersection of 3 different terrain types,
where we should be able to study the relationships between these geologic
units and therefore interpret their history. But to get there quickly we
will need to use the "autonomous navigation" that we are starting to check
out. After the drive, we have some time for science observations, which
were the focus of the science team's efforts today. It was my last shift
as SOWG Chair for a few weeks, and went more smoothly than yesterday's
planning. The biggest problem today was that the data volume expected to
be relayed by the Mars Reconnaissance Orbiter in time to plan Sol 25 is
very small, probably not enough to return the images we need to plan
another drive. Hopefully we will get more data through MRO than expected,
and we prioritized the various data products accordingly. If we don't get
at least one stereo pair of images of the terrain in front of the rover
after the drive, we will have to stay put for a sol. Obviously, this
wouldn't be a problem, but we would like get to Glenelg soon, and it is
about 400 m away.
We received confirmation that the last of the Mastcam characterization data
were acquired, so we were able to plan new Mastcam observations today.
This was a relief to the science team, and especially to me, as fitting it
all in to the plans over the past week required a lot of planning.
Ken
Written by Ken Herkenhoff, Planetary Geologist at USGS Astrogeology Science Center