












The Sol 1101 activities that we planned yesterday did not complete due
to an arm error while it was being stowed. Apparently the shoulder
azimuth motor was too cold, so the rover software halted the stow,
which precluded the drive that was to follow. The rover is therefore
in the same position that it was yesterday.
I'm not scheduled in any operational role today, but I called in to
help plan MAHLI imaging of the ChemCam optical window, to monitor dust
accumulation. The operations team had to scramble to recover from the arm
error and plan science observations, but was able to put together an
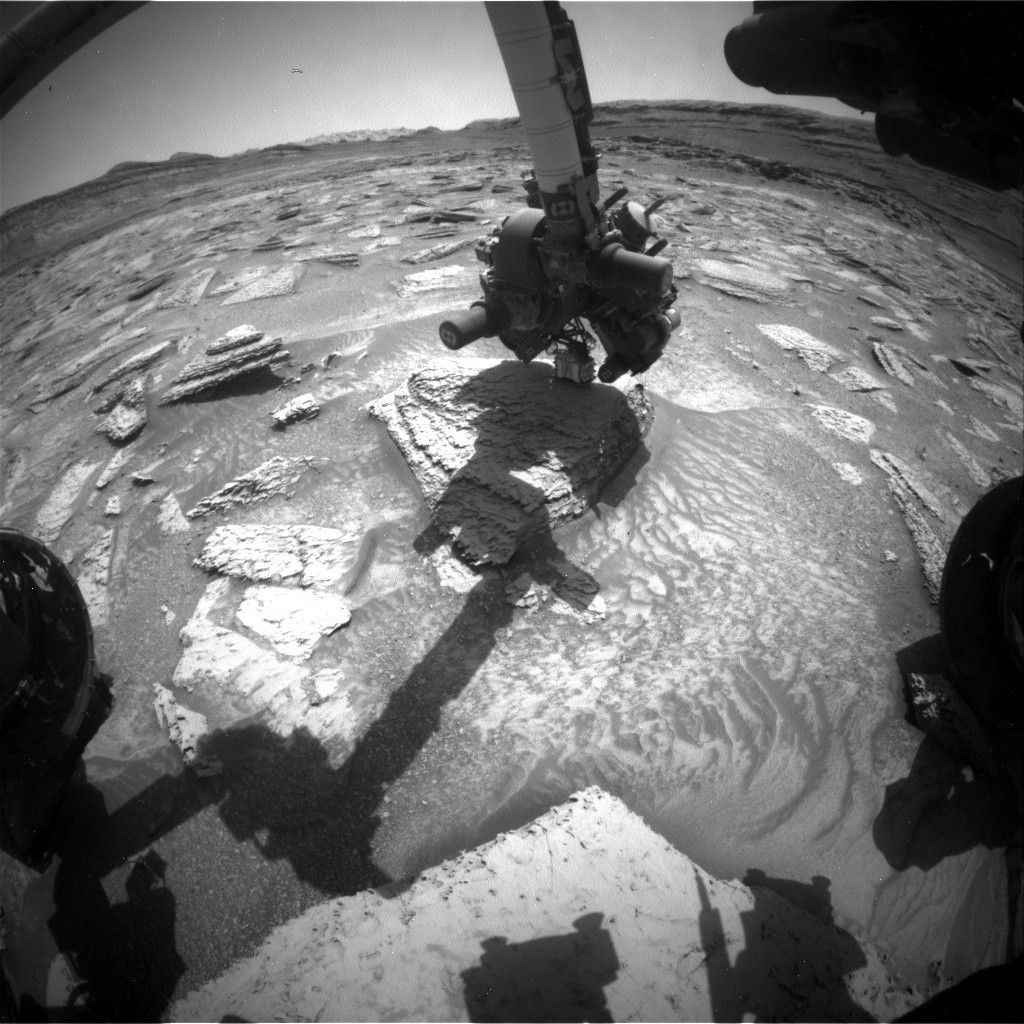
excellent weekend plan. On Sol 1102, MAHLI will take the standard
images of the rover wheels, then acquire a full suite of images of a
rock dubbed "Badlands." APXS will then be placed on the rock for an
overnight integration. Arm work will continue on Sol 1103, with MAHLI
images of the ChemCam window. Then ChemCam and Mastcam will observe
targets named "Madison" and "Jefferson." On Sol 1104, the RMI and
Mastcam will take images of a bright ridge on the flank of Mt. Sharp,
then ChemCam and Mastcam will observe "Lincoln." Mastcam will also
acquire another mosaic of the wall of Bridger Basin, then the rover
will drive to the bright Murray outcrop "Saddle" as planned yesterday.
Fortunately, the Sol 1104 orbiter overflight geometry is better than
it was yesterday, so we expect to receive all the data needed for
planning on Monday . Finally, early on Sol 1105, Mastcam and Navcam
will observe the sun and sky soon after the Mars Odyssey orbiter flies
over, so that orbiter observations can be compared with nearly
simultaneous observations from the surface. Overall, not a bad plan,
considering that the operations team had to quickly respond to the arm
error!
by Ken Herkenhoff
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Written by Ken Herkenhoff, Planetary Geologist at USGS Astrogeology Science Center