













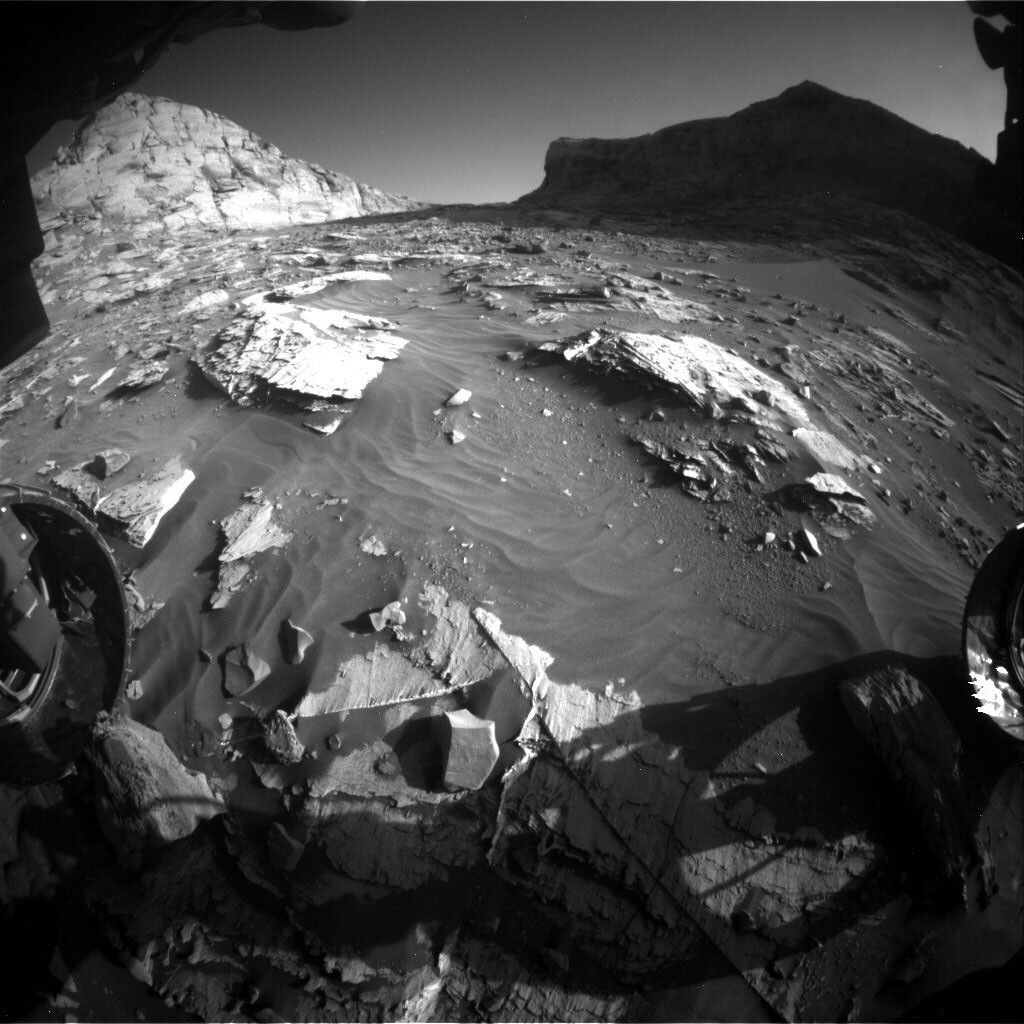
Curiosity is currently located within “Maria Gordon notch,” which is a rather tight canyon surrounded by high rock walls located at the transition onto the Greenheugh Pediment. Her views are currently magnificent - steep walls surround Curiosity and cast some rather dramatic shadows onto the workspace.
However, despite the beautiful views, today was a sobering lesson in the complexities of planning and executing martian surface science investigations. On some days, planning the scientific activities for the Curiosity rover to perform on Mars seems easy - observe cool features, plan cool observations, and let Curiosity execute the plan as proposed. Today, unfortunately, was not one of those days. A series of events (including a drive that was cut short on the previous day and a delay in getting all of our data processed, mosaicked, and ready for scientists to use) prevented our original plan from being submitted and executed. First, because Curiosity’s drive ended early yesterday, we did not have the full imaging data available to us to ensure that we could use the rover arm and APXS instrument safely. Therefore, we scrubbed our original plan to perform an APXS observation of “typical” bedrock in front of the rover in exchange for using the MAHLI instrument to image the rover wheels and to determine whether Curiosity is in a stable position to use the arm in the next planning cycle. Next, we modified our original plan to target local bedrock with a ChemCam LIBS observation in exchange for a ChemCam AEGIS activity, which is designed to automatically identify targets of interest in the landscape and autonomously target them with ChemCam’s laser instrument. Lastly, the team planned a handful of Mastcam imaging mosaics with the limited pointing and localization information available to the team.
Even though today came with a lot of complexity and a lot of “back-and-forth” between the science team and the rover planners, the uplink team managed to develop and uplink a really strong plan to characterize our current workspace with Mastcam and ChemCam observations. Even though we’re still doing great science today, here’s to hoping that the next few planning cycles are smoother and more straightforward than today’s planning cycle!
Written by Mark Salvatore, Planetary Geologist at University of Michigan