![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)







MSL is making good progress, driving almost 68 meters last
weekend. We had the option of taking some MAHLI images on Sol 1412, but
decided to maximize the drive distance instead. Before the drive,
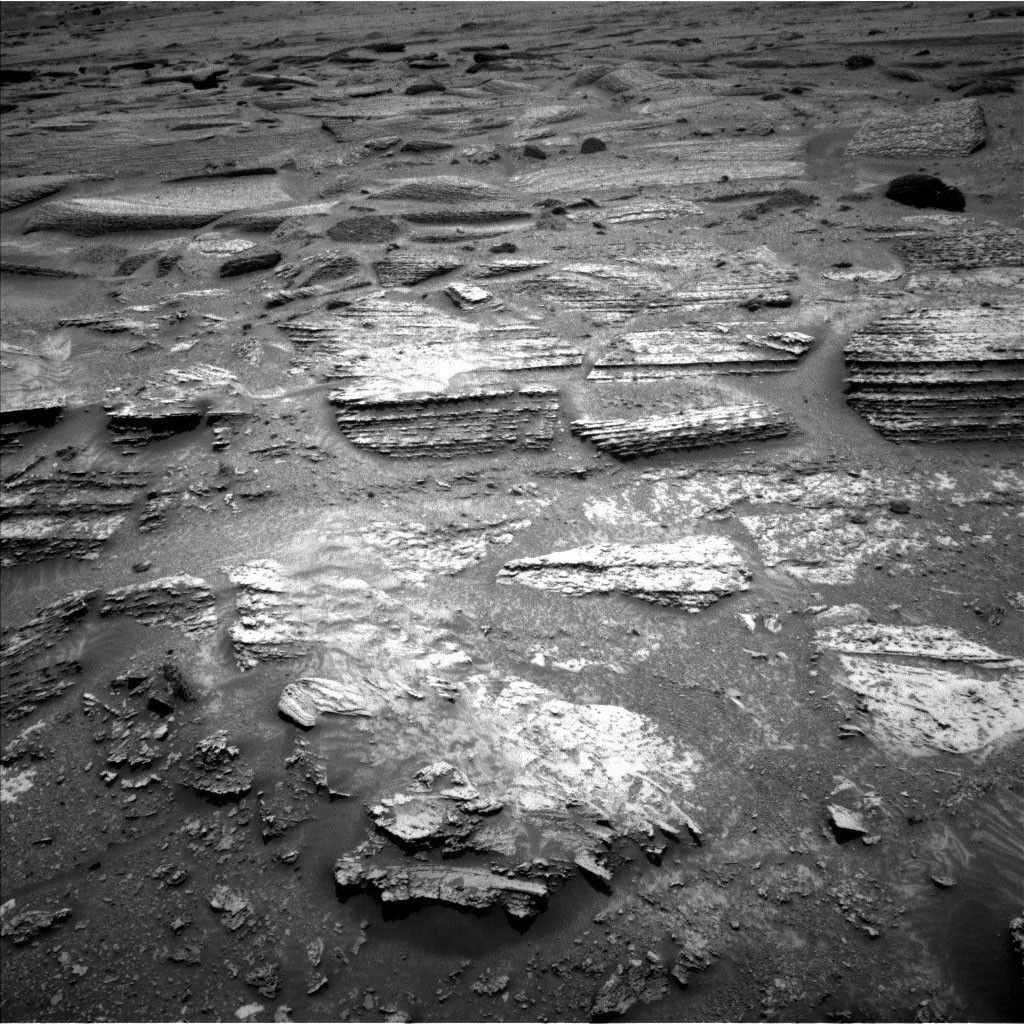
ChemCam and Mastcam will observe bedrock targets "Jamba" and "Huambo"
and the Right Mastcam will acquire a 3-image mosaic of a small
depression called " Mungo ." After acquiring the post-drive imaging needed to plan future mobility, ChemCam will use AEGIS to autonomously select a new target for a LIBS raster. Early the next
morning, Navcam will search for clouds and dust devils, and Mastcam will
measure the dustiness of the atmosphere. The dust measurements will be
repeated at noon and mid-afternoon to look for changes during the day.
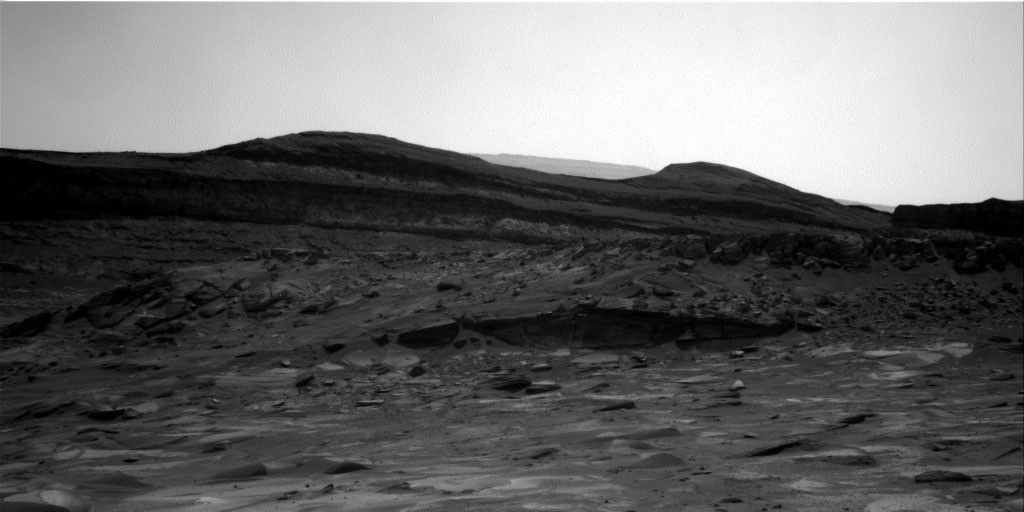
The Right Mastcam will also acquire a 14-image mosaic of the Murray
Buttes early in the morning, and we finally were able to plan the
long-distance RMI mosaic! The tactical team did a great job of planning
today, so it has been a relatively easy day for me as SOWG Chair.
by Ken Herkenhoff Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Written by Ken Herkenhoff, Planetary Geologist at USGS Astrogeology Science Center