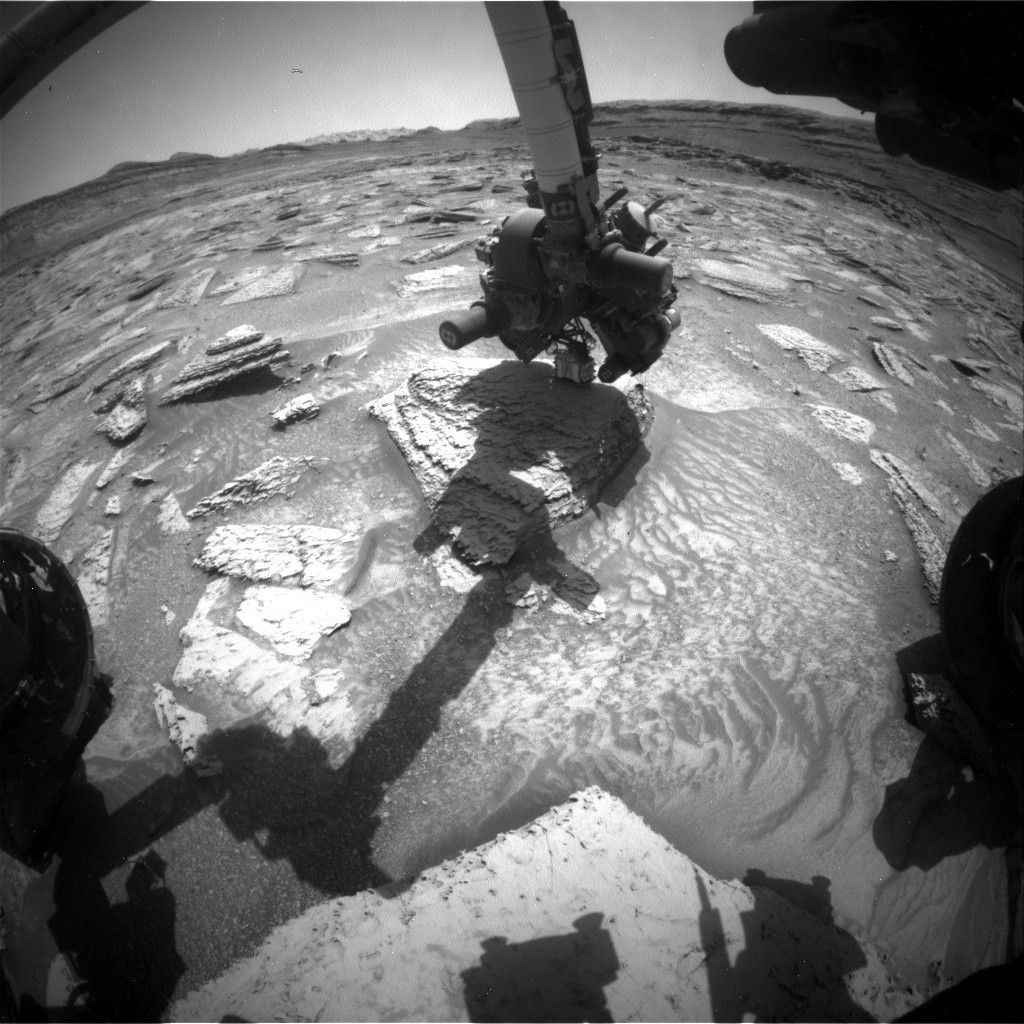

















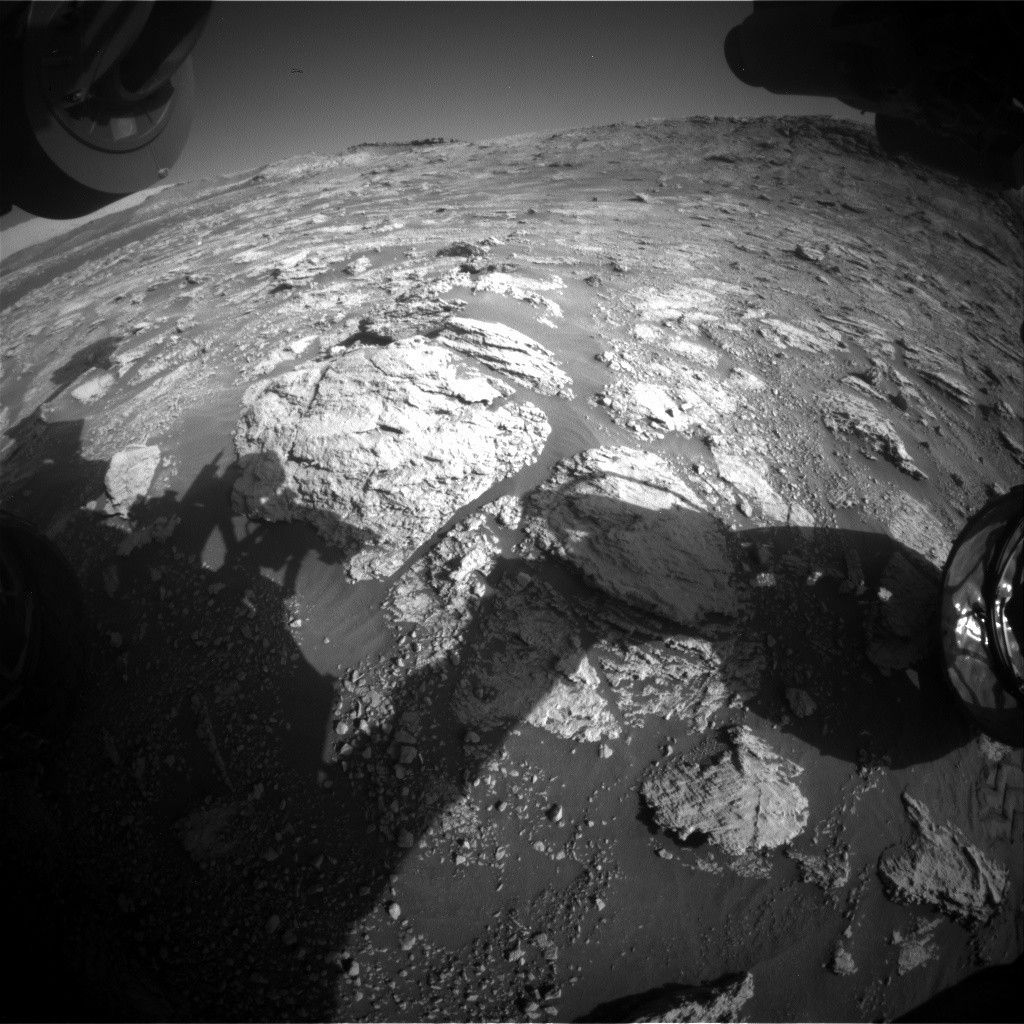
Today we had a 2-sol plan, though we are restricted, and so doing all our arm and drive activities on the first sol. As part of our standard cadence, we are doing MAHLI and APXS on a target named “Well Run” so that we can compare the compositions of the Western Butte with what we saw at the Central Butte. After stowing the arm, we have a science block with a survey of local rocks with ChemCam and Mastcam. Then we are driving to another laminated block about 15 m away with the intent to do contact science. After the drive, and before we do our post-drive arm unstow and post-drive imaging, we are doing a sun update to reset the rover’s attitude estimate, which keeps our ability to point back at Earth. On the second sol of the plan we are doing some AEGIS observations (can’t wait to see what AEGIS picks to look at!) and some standard environmental observations – dust devil survey and movie and a Navcam line-of-sight observation to look at the atmospheric opacity.
Written by Ashley Stroupe, Mission Operations Engineer at NASA's Jet Propulsion Laboratory