



















After spending the last few weeks exploring the top of the nearby pediment surface, Curiosity is now making her way back down from the pediment and towards an alternate route to Gediz Vallis Ridge.
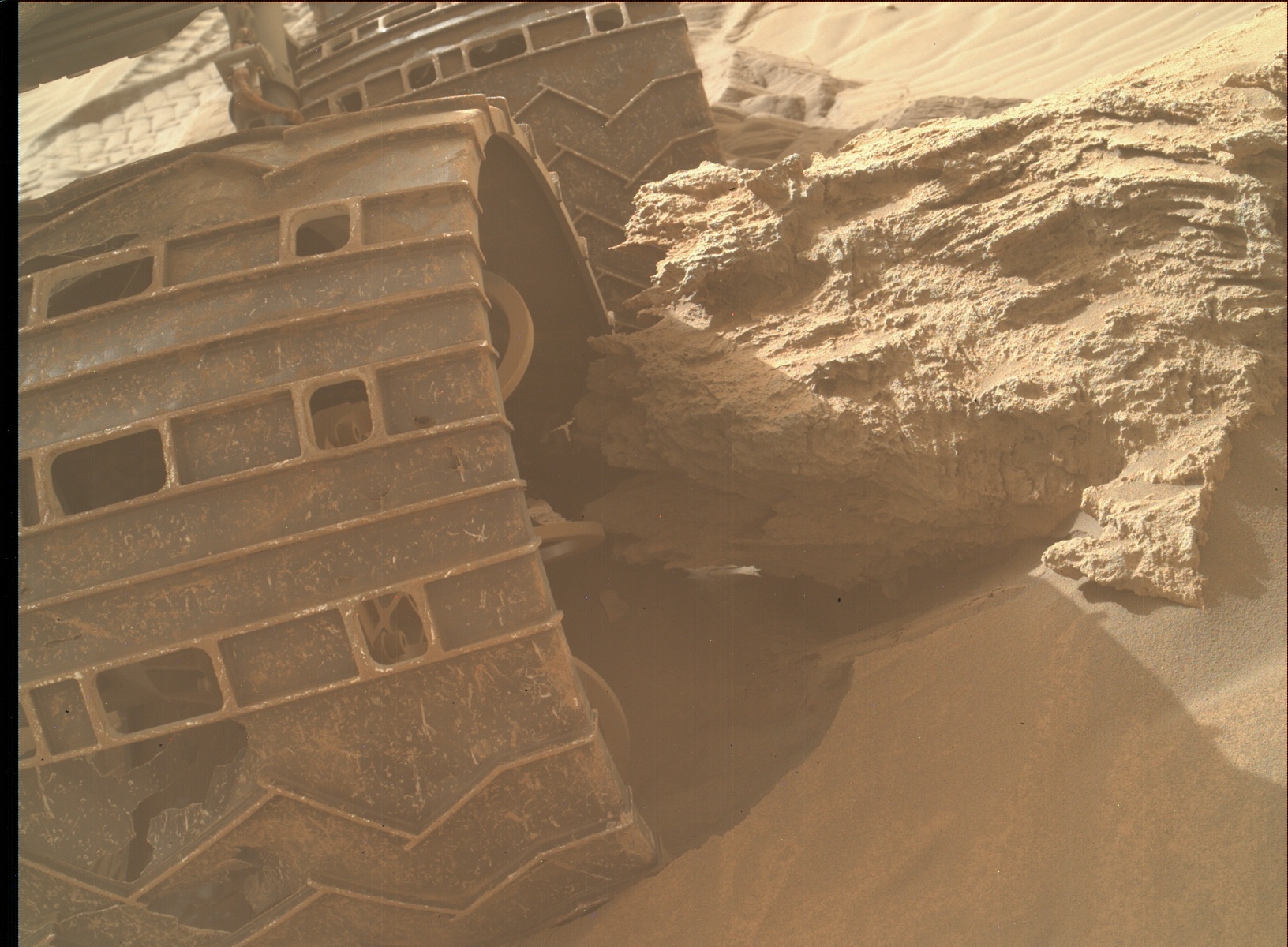
The beginning of the most recent drive sequence successfully extracted Curiosity from the rock that stopped last Wednesday’s drive (see images
<!-- wp:image {"background": {"contentType": "image", "id": 358824, "url": "https://science.nasa.gov/wp-content/uploads/2024/03/3447MH0002620001202307E01_DXXX.jpg", "alt": "NASA's Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover's robotic arm, on April 17, 2022, Sol 3447 of the Mars Science Laboratory Mission.", "caption": "Figure A", "credits": "NASA/JPL-Caltech/MSSS
", "zoom": 0, "fit": "fit", "parallax": "no", "focalPoint": {"x": ".50", "y": ".50"}}, "image_align": "inline", "migrated": true} -->

and
, but the second half of the drive was cut a bit short because Curiosity’s wheels were observed to be slipping a bit as she was descending through this sandy region. While not a concern for the health or activity of the rover, it has made our descent take a bit longer than expected. That’s okay - plenty more time for additional science observations as we traverse back through the same landscapes that we explored in late February of this year!
In our current plan, we will be performing an APXS analysis on a small flat patch of local rock named “Runn” and will also be analyzing some local bedrock to the right of the rover using the ChemCam instrument’s LIBS capabilities. Finally, we will also acquire several high-resolution imaging mosaics of the surrounding landscape captured by both Mastcam and ChemCam. Curiosity will then continue her drive down from the pediment, acquiring post-drive imagery and data for ENV science, in addition to a standard post-drive AEGIS observation using ChemCam. Over the next few days, Curiosity will continue to drive back towards the path that team has identified as the likely best route to continue the Mt. Sharp ascent.
<!-- wp:image {"background": {"contentType": "image", "id": 358826, "url": "https://science.nasa.gov/wp-content/uploads/2024/03/3447MH0002620001202306E01_DXXX.jpg", "alt": "NASA's Mars rover Curiosity acquired this image using its Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover's robotic arm, on April 17, 2022, Sol 3447 of the Mars Science Laboratory Mission.", "caption": "Figure B", "credits": "NASA/JPL-Caltech/MSSS
", "zoom": 0, "fit": "fit", "parallax": "no", "focalPoint": {"x": ".50", "y": ".50"}}, "image_align": "inline", "migrated": true} -->
Written by Mark Salvatore, Planetary Geologist at University of Michigan