












Earth planning date: Friday, June 2, 2023
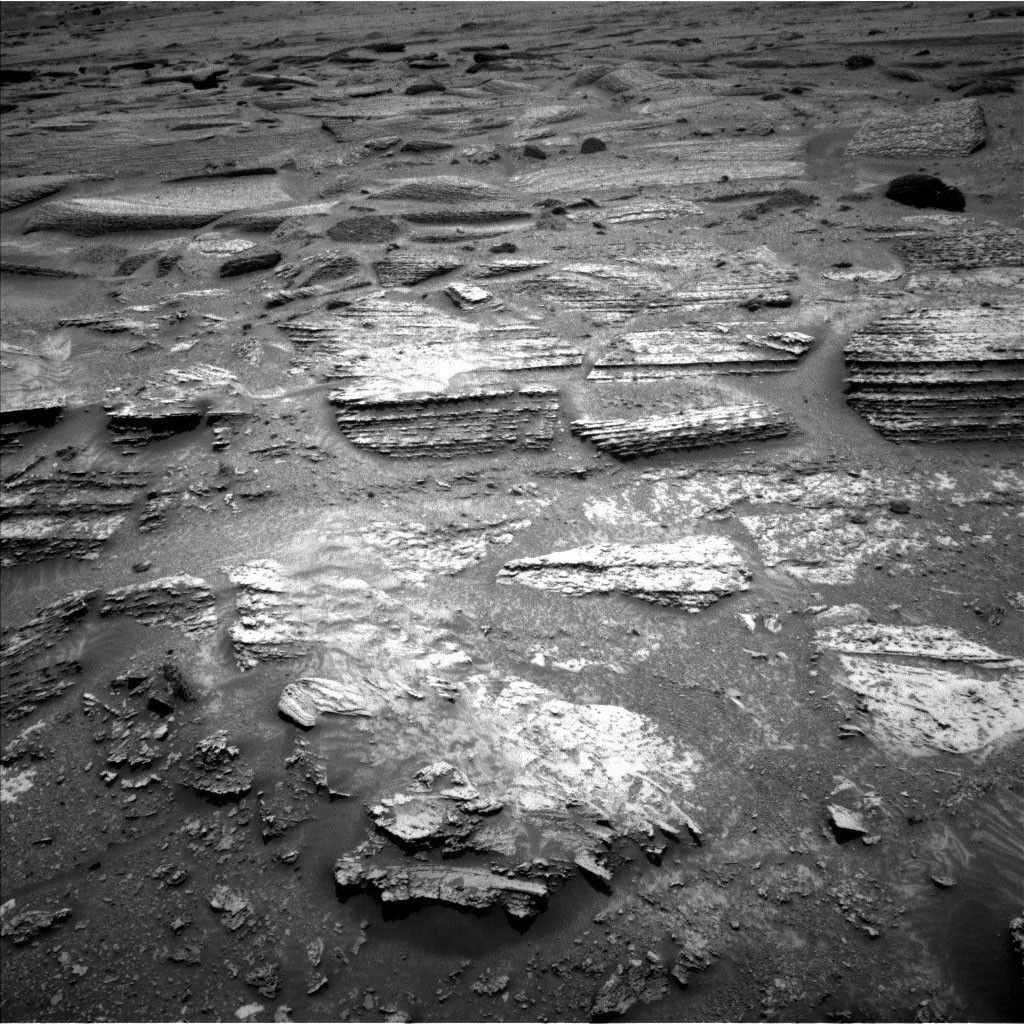
Today, when the team came in for planning our 3-sol weekend plan, we discovered the terrain had bitten us once again and ended the drive early. The rover’s right middle wheel was perched on a rock (see the image), making it unsafe to do the arm activities and contact science we had planned. The team quickly pivoted to taking a lot more imaging, along with continuing to push through this difficult area.
On the first sol of the plan, we take a lot of imaging. We start off the day with a Navcam line-of-sight image to look at the dust in the atmosphere. Next, Mastcam takes a stereo image of the sand ripple next to the rover that has been so challenging to get through. Mastcam is also taking stereo imaging of a scour feature and a nearby fractured rock, which can tell us about how rocks weathered. ChemCam then makes a LIBS observation of the rock “Cerro Bravo,” which is a piece of bedrock with nodules, followed up by a Mastcam documentation image. After a nap, the rover wakes up to take some additional afternoon atmospheric observations including a cloud observation, and some other sky imaging. After another nap, around sunset, Curiosity will wake up for a SAM EBT (a monthly maintenance activity).
On the second sol of the plan, we do some additional targeted science. We start with more atmospheric observations, including Navcam dust devil movie and suprahorizon movie and a Mastcam of the sky as well. Then, Chemcam takes a 5x1 LIBS observation of the “Aloepi” target, which is another nodular block, and a RMI mosaic which shows boulder variation and distribution on the Gediz Vallis ridge, followed up with a Mastcam documentation image of Aloepi.
After the imaging, it is time to drive. The terrain here is very challenging because it has both big rocks and lots of sand, both of which can cause significant slip (the image also shows the rover tracks behind Curiosity, and it is evident how much the rover is sinking into the sand). Some of the rocks are also quite big and we do not want to drive over them – these can cause faults on the drive or even be dangerous to the rover. The Mobility Rover Planner (RP) needed a lot of time to try to figure out how get Curiosity out of the area where the last drive faulted and back onto the safest path forward.
Just after the drive, we have a MARDI twilight image. These images can be really helpful to the RPs on tough terrain or when the drive faults because they provide an additional view under the rover, Later in the evening we do an APXS atmospheric observation, which we can do with the arm still stowed – fortunately in the stowed configuration the APXS is pointed in front of the rover, making this possible.
The third sol of plan has some additional imaging, Mastcam is taking a look at the rover deck to monitor dust accumulation. ChemCam is using AEGIS to look for interesting targets post-drive and also taking a sky observation. Lastly, Mastcam makes a solar tau observation to look at the sun and the dust in the atmosphere. After a relaxing night just waking up for communication with the orbiters to relay date, Curiosity wakes up early in the morning for some additional atmospheric observations, a Mastcam sol tau, and Navcam zenith and horizon imaging.
Written by Ashley Stroupe, Mission Operations Engineer at NASA's Jet Propulsion Laboratory