















NASA’s Perseverance rover is now exploring the upper surface of the Western Fan in Jezero crater, having completed a very successful one Mars year Prime Mission.
NASA’s Perseverance rover is now exploring the upper surface of the Western Fan in Jezero crater, having completed a very successful one Mars year Prime Mission. It has sealed 22 of the 43 sample tubes it brought to Mars and created the Three Forks Sample Depot where it deposited 10 of these samples.
The Mars Sample Return mission aims to bring some of the samples that Perseverance collects from Mars to Earth via tube transfer to a Sample Retreival Lander, via either:
- Perseverance Passes the Baton: In the primary plan, the Mars Sample Return Sample Retrieval Lander (SRL) will land close to Perseverance, which would then drive up to it. The lander’s robotic arm would then transfer one tube at a time from Perseverance’s bit carousel into the Mars Ascent Vehicle on the lander—a rocket that would launch the samples into martian orbit for rendezvous and capture by an Earth Return Orbiter (ERO).
As a backup plan, SRL would carry two Sample Recovery Helicopters (SRHs) to Mars.
- Sample Recovery Helicopters Fly, Drive, Grab, and Drop: To hedge against anything unexpected preventing Perseverance from delivering samples to SRL, the rover collected twin samples at the first seven sampling locations so that one of each pair could be deposited at the Three Forks depot. Perseverance could also deposit a second depot in the future with more than 10 tubes for collection. The Sample Recovery Helicopters could fly to a sample depot, collect one sample at a time, fly back to the lander and drop it for the lander robotic arm to pick up from the surface.
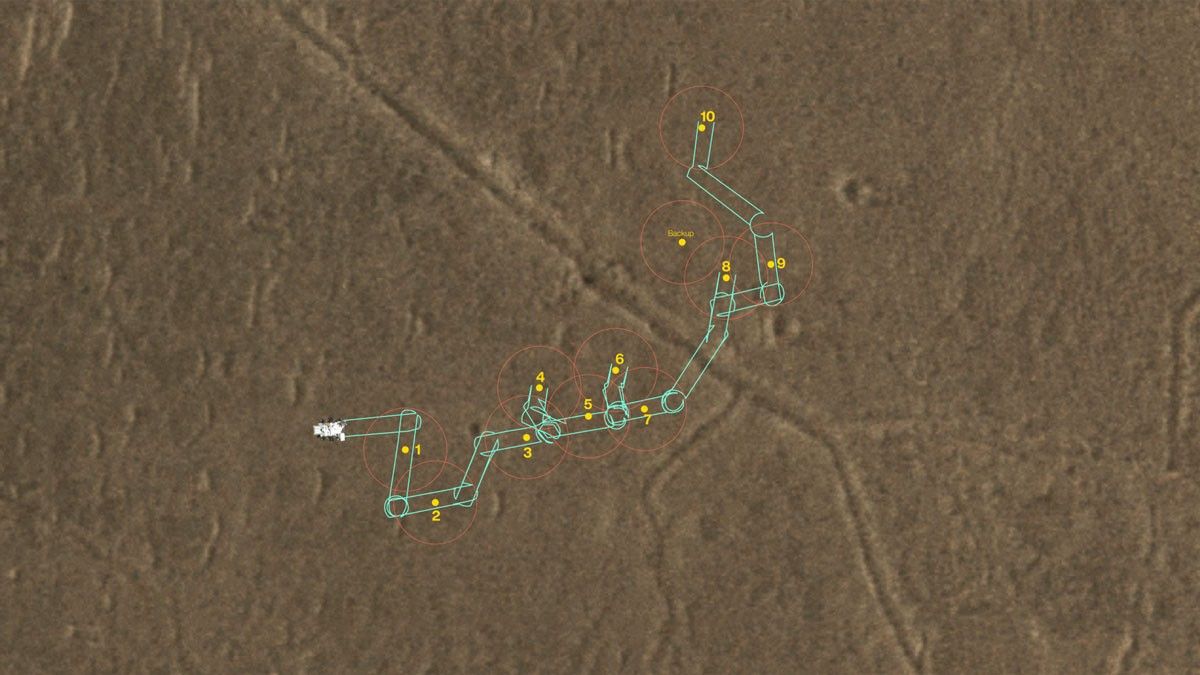
So why did we create the Three Forks depot in that shape?
- Recovery helicopter access was the biggest factor. Around the drop zone, a 5.5 meter (18 feet) radius circle had to be free of hazards for the SRH. The drop had to be within 70-95 centimeters (27.6-37.4 inches) of the center of this circle to allow it to encompass a donut-shaped landing zone and a central drive, grab, and go zone. SRH is expected to weigh just 2.3 kilograms (5.1 pounds) including small wheels and a gripper for which rocks ~2 centimeters (0.8 inches) in diameter could be a potential hazard. The entire depot also needed to be within 200-700 meters (656.2-2296.6 feet) flight distance from a location for SRL landing.
- No communication obstructions such as the rover body or terrain could block Perseverance’s High Gain Antenna during the depot construction, since that is how the rover receives instructions. This had to be factored in for the approach and parking heading for each drop zone.
- View of the next drop zone had to be unobstructed by the rover body to take high resolution images for checking recovery helicopter hazards.
- Rover return access had to be maintained to allow driving through the Sample Depot after drops in case we needed to re-image or use the lower drill stabilizer tip to topple a tube that might have landed standing straight up. The SRH gripper arm is designed to pick up a tube lying horizontally on the ground.
While creating the depot, Perseverance alternated between two types of activities:
- Drop and image used choreographed moves between the Perseverance external robotic arm and the Adaptive Caching Assembly (ACA) inside the rover, which has a second robotic arm - the Sample Handling Arm - to image the sample before and after depositing it on the ground.
- Drive and photoshoot involved backing up and taking mid-drive images of the dropped sample - a 7inch (18.6cm) tube and glove combination, which is called an RGA (Returnable Sample Tube Assembly and attached Glove Assembly). Each drive concluded with a precision approach to place the ACA over the next drop zone. The drive distances between drop zones ranged from ~8-22 meters (26.2-72.2 feet). If the RGA was dropped too close to a wheel (as found in some Earth testing), a RGA Avoidance Maneuver (RAM) was to be executed with the rover driving backwards to avoid rolling over the RGA. As it happened, the tubes on Mars all dropped nominally and Rover Planners didn’t have to say "RPs are GO for RAM" and "RPs will commence RAMing."
During the 42 martian days (sols) that it took to to create and document the Three Forks depot, the rover drove 207.93 meters (682.2 feet), dropped 10 sample RGAs, and took 4000 images. The team gathered together in mission control toward the end of sample depot creation, and it was wonderful to take the time to appreciate the quiet geniuses in various areas who made it all seem so simple. As we walked out of the room, the next uplink commanding the rover was already in progress as Perseverance moved on at a fast clip. It is now collecting single samples (instead of pairs) from each rock target to add to its collection before its rendezvous with the Mars Sample Return spacecraft to see samples launch from Mars for return to Earth.
Written by Vandi Verma, Chief Engineer for Robotic Operations at NASA/JPL