


















Perseverance’s First Autonav Drive
| Credit | NASA/JPL-Caltech |
|---|---|
| Language |
|
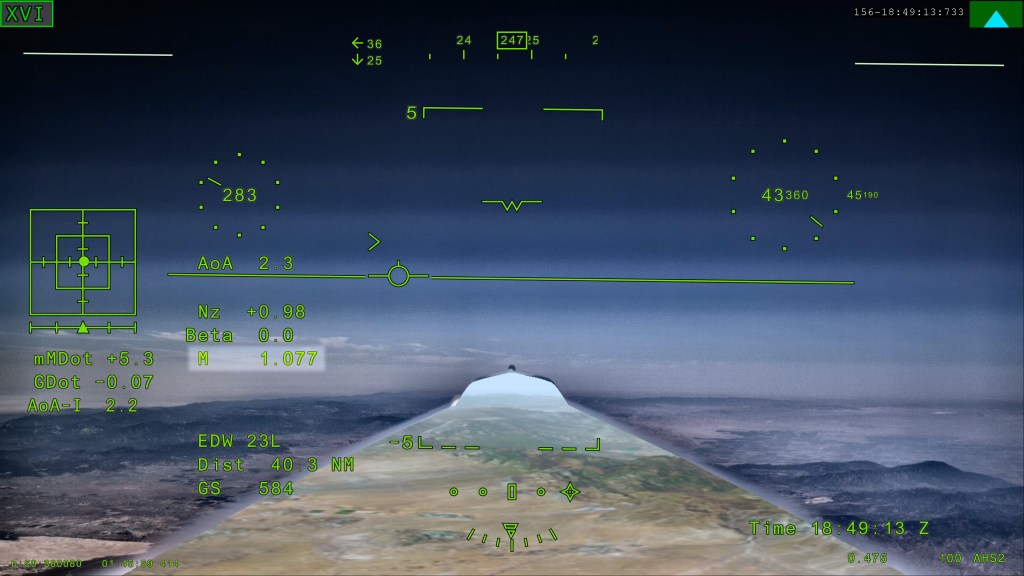
The view from the left and right navigation cameras aboard NASA’s Perseverance Mars rover during its first drive using its auto-navigation function, also called AutoNav. While the navigation cameras are capable of color, the mobility software uses panchromatic images, which are easier for the machine-vision software to process.
Perseverance’s upgraded cameras and new Vision Compute Element computer have enabled major upgrades in mobility software. The new auto-navigation algorithms allow the rover to drive quicker and more efficiently than its predecessors. As a first test of its abilities, Perseverance’s team planned a drive that took the rover to a hazardous rock with AutoNav enabled. The software identified the rock as hazardous and successfully deviated the rover’s course around it.
A key objective for Perseverance’s mission on Mars is astrobiology, including the search for signs of ancient microbial life. The rover will characterize the planet’s geology and past climate, pave the way for human exploration of the Red Planet, and be the first mission to collect and cache Martian rock and regolith (broken rock and dust).
Subsequent NASA missions, in cooperation with ESA (European Space Agency), would send spacecraft to Mars to collect these sealed samples from the surface and return them to Earth for in-depth analysis.
The Mars 2020 Perseverance mission is part of NASA’s Moon to Mars exploration approach, which includes Artemis missions to the Moon that will help prepare for human exploration of the Red Planet.
JPL, which is managed for NASA by Caltech in Pasadena, California, built and manages operations of the Perseverance rover.