![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)






PROJECT
Integrated Sampling System (ISS) for Ocean Worlds
SNAPSHOT
Honeybee Robotics has developed a pneumatic based sample acquisition and transfer system that is self-metering, gravity agnostic, works with sticky materials, and is flexible in terms of delivery location. The system is designed to operate on planetary bodies both with and without an atmosphere.
The next phase of groundbreaking planetary science requires access to the sub-surface and a means to capture planetary material for analysis. NASA has flown several missions with the goal of acquiring surface material and delivering it to onboard analytical instruments. These surface-sampling architectures relied on gravity to move a sample from a scoop or a drill into an instrument inlet port. This method, however, poses a challenge when dealing with sticky materials. An SMD-funded Honeybee Robotics team has developed an Integrated Sampling System (ISS) that is gravity-agnostic and can work equally well with both non-cohesive and cohesive materials. This new approach employs an “old school” technology—vacuum cleaners—to acquire samples in conjunction with a “lacrosse stick” to transfer the samples to onboard instruments.
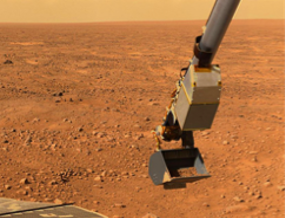
Robotic arms with drills and scoops have been the traditional approach to sample acquisition and delivery on planetary surfaces. An example of such a system includes the successful Mars Phoenix mission that landed in the Northern Polar region of Mars. The Phoenix lander had a five-degree-of-freedom robotic arm with a scoop, referred to as the Icy Soil Acquisition Device (ISAD). The ISAD included a small drill, named “rasp,” for cutting into icy soil and ice to create chips that were then scooped and delivered to two instruments within the lander. The nominal operational sequence was relatively straightforward: drill several holes with the rasp, scoop up the icy chips, position the scoop over the instrument inlet port, and finally rotate and dump the material into the inlet port. During the very first sampling attempt, the samples that were successfully collected in the scoop would not fall out into the inlet port. Given the low temperature (-100°C) and low-pressure environment, the expectation was that any ice would remain stable. However, while waiting for a signal from Earth, faint rays from the Sun warmed the scoop and the icy soil inside. The resulting increase in material temperature, coupled with the unexpected antifreeze salts in the soil, was sufficient to thaw the ice. When the Sun angle dropped, the material refroze and adhered to the scoop, a phenomenon that is very familiar on Earth. Fortunately for the Phoenix mission, the ISAD had a “percussive mode.” In this percussive mode, rasp-created rattling helped dislodge the adhered material from the scoop. Moving forward, the Phoenix team addressed this issue operationally by sampling early in the morning and as quickly and efficiently as possible to limit solar heating of the scoop.
When developing a sampling system for Titan and icy moons under the COLDTech program, Honeybee Robotics leveraged the lessons learned from Phoenix and prior missions. They used this experience to define a number of key requirements: 1) Enable the system to handle the inevitable issues of sticky samples, 2) Enable small volume analysis from a large input sample volume and deliver the sample to a chemical analysis instrument in small (~10 mm) diameter cups, and 3) Deliver a sample from the surface to an instrument that sits in the middle of a spacecraft.
Under the NASA COLDTech program Honeybee developed a fundamental understanding of pneumatic sampling systems. Initially, the Honeybee team employed the century-old ‘cyclone separator’ technique. While the cyclone is widely used in industrial settings, this gravity-based system performed poorly with sticky materials. On a moon with lower gravity, sticky materials would be even more of a challenge than here on Earth. Honeybee realized that gravity needed to be removed from the equation and that a non-traditional solution—the combination of a household vacuum cleaner with a small lacrosse stick—was required.
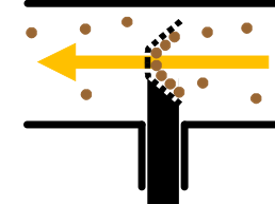
A lacrosse stick is very good at capturing fast-moving objects. And a pneumatic vacuum is able to move sample particles quickly, rather than letting the particles slow down, as a cyclone system would. The Honeybee team used these two concepts together in an innovative design: a vacuum system pulls sample particles through a tube and quickly past a small “lacrosse stick," where some of the flying particles get caught in the net. The captured sample particles can be moved to where they are wanted, and the sample size can be increased or decreased by simply changing the size of the net.
“This technology has potential to revolutionize planetary sampling systems.”
-Dr. Kris Zacny
While this architecture is not traditional, it addressed all of the key requirements. Pneumatic systems are significantly more powerful than gravity as dense particles, like pennies, can be moved up a vacuum cleaner hose even in Earth gravity. Pneumatic systems can also work well with dry and sticky materials as observed by powerful shop vacs being used to clean water and mud. Additionally, the flexible vacuum hose can be routed around any obstacle, enabling a connection between the sampling nozzle on the surface to the instrument on the other side of the lander. The lacrosse net is an effective, unbiased means of metering out the sample – it captures all that is required, no more, no less, and allows the particles flying past it back into the environment.

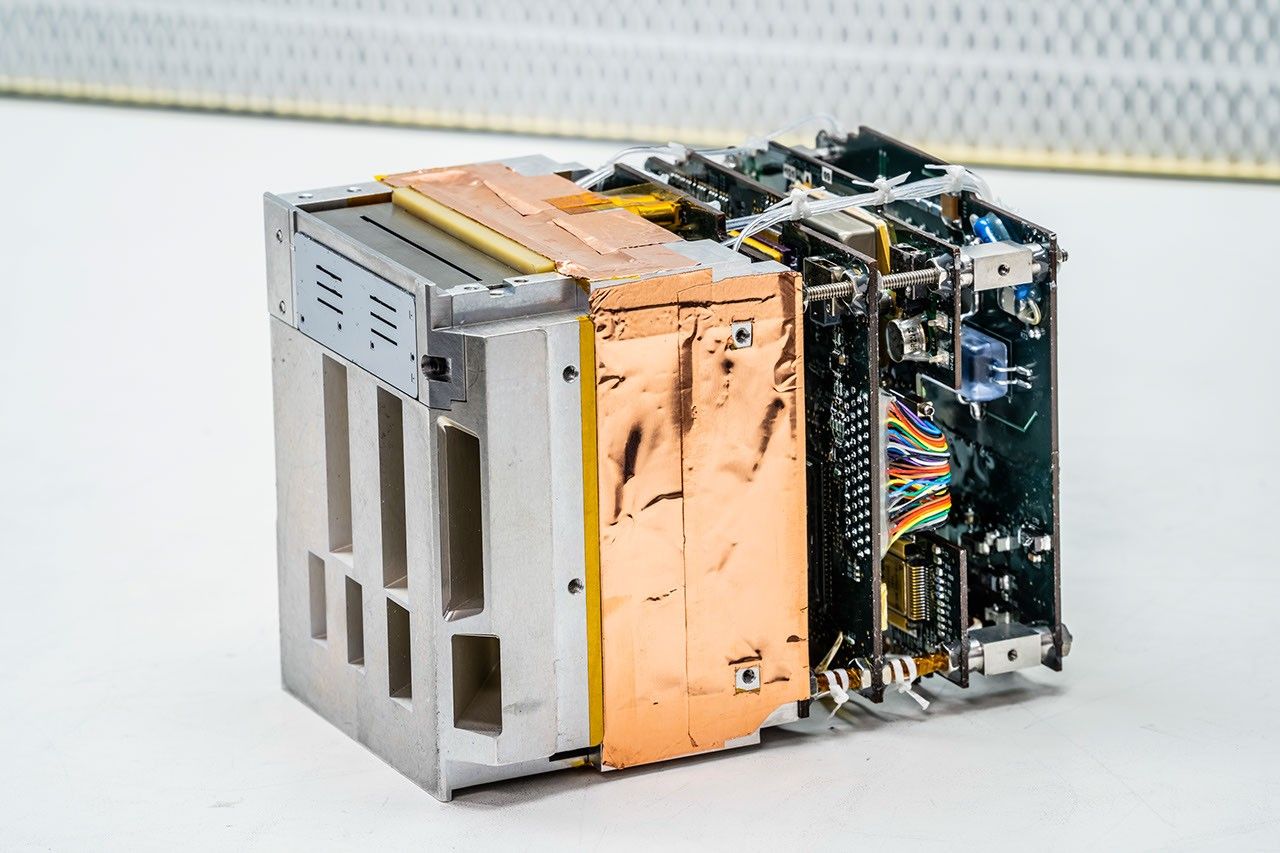
The “vacuum and lacrosse stick” concept now form the backbone of the sampling system for Dragonfly, selected in 2019 as NASA’s next New Frontiers mission. The sampling system, DrACO (Drill for Acquisition of Complex Organics), consists of two redundant drills, a carousel with dozens of cups (modified lacrosse nets), and a vacuum system with two redundant blowers. The drills and blowers are in a cross-strapped configuration as any of the two drills can be used with any of the two blowers. The sampling operation starts with a drill cutting into Titan’s surface to grind up material. The vacuum system then sucks up material into a transfer tube, while the cup with a lacrosse net captures some of this material for analysis. The carousel subsequently moves the cup into one of the two onboard instruments (a gas chromatography mass spectrometer or a laser desorption mass spectrometer) for analysis.
The technology has also been demonstrated for applicability to airless bodies such as Earth’s Moon. In these cases, compressed gas is brought from Earth to mobilize surface material and create this dusty flow. PlanetVac and Pneumatic Sampler are utilizing this approach and will fly to the Moon in 2023 using NASA Commercial Lunar Payload Service (CLPS) and to the Martian moon, Phobos, in 2024, respectively.
PROJECT LEAD
Dr. Kris Zacny, Honeybee Robotics
SPONSORING ORGANIZATION
Planetary Science Division, COLDTech Program