PROJECT
Model-based Off-Nominal State Identification and Detection (MONSID) software
SNAPSHOT
Keeping NASA’s robotic explorers healthy takes smart software, especially in remote and harsh environments. An initial investment by NASA’s Small Business Innovation Research (SBIR) Program led to development of a new technology that may enable robotic exploration of distant destinations in our solar system.
Europa, an intriguing moon of Jupiter, has an icy surface and evidence of a liquid ocean underneath that likely contains more water than the Earth’s oceans. Arthur C. Clarke recognized its uniqueness in his novel 2010: Odyssey Two with the memorable passage “All these worlds are yours. Except Europa. Attempt no landing there,” as a warning to future explorers to protect that world for possible evolution of life. Scientists believe life may be possible on Europa if liquid water and favorable chemical elements exist. But we must get closer to confirm their presence – and exploring Europa is a formidable challenge. Given Europa’s distinctive characteristics, how can we not explore this fascinating destination?
To answer this call, NASA is developing concepts for robotic explorers that will land on Europa and search for signs of life by sampling the ice and possibly the ocean below. Europa’s surface is a forbidding place, with temperatures below –260°F and bathed in strong radiation that can disrupt electronics. Europa also is so far from Earth that it would be difficult to manage a robot’s activities on an hourly or even a daily basis. (It will take approximately 50 minutes for a signal from Earth to reach any robotic explorer that NASA deploys there.) One solution is to make our robotic explorers smarter and more autonomous, so that they can detect and handle issues without human intervention. One crucial aspect of autonomy is the ability for a robot to check its hardware for problems, determine if something is not working properly, and pinpoint the faulty component.
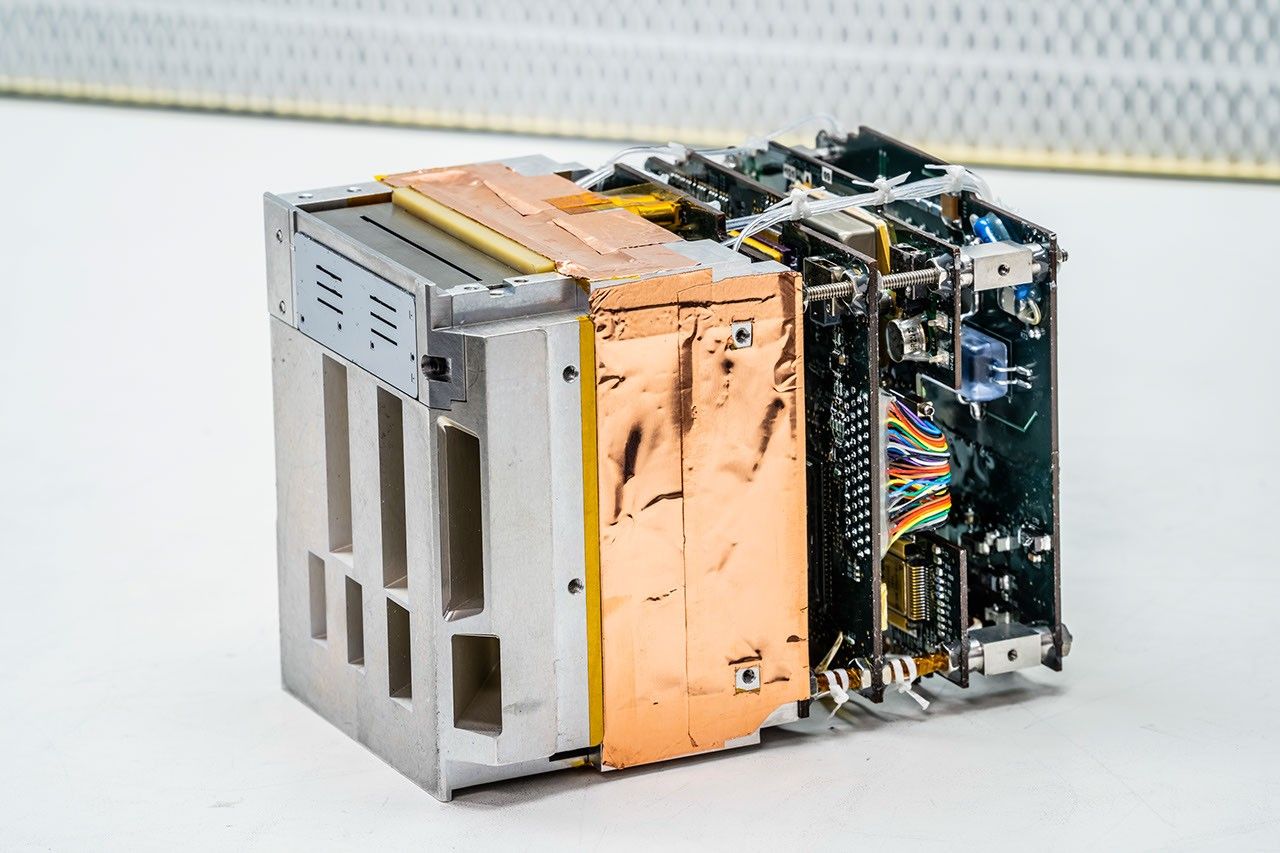
NASA’s Jet Propulsion Laboratory (JPL) is working with a small company called Okean Solutions, Inc. to develop this capability that could one day be used on missions to challenging space environments such as Europa (Figure 1). Okean’s MONSID (Model-based Off-Nominal State Identification and Detection) software checks the health of a system by comparing onboard measurements to simulations or models of the expected behavior. MONSID verifies correct behavior, detects when something is amiss, and then identifies which piece of hardware is not operating properly. This “model-based” approach uses the constraint suspension technique—an analytical approach developed for use on digital systems by Professors Randy Davis and Howie Schrobe at the Massachusetts Institute of Technology (MIT). While working on her dissertation at the University of California, Los Angeles, Lorraine Fesq extended this capability to work with analog values such as the temperatures, voltages, and currents that are found on robotic systems. Ksenia Kolcio and Maurice Prather, Vice President and President of Okean Solutions respectively, subsequently developed and matured MONSID through several NASA and Air Force SBIR-funded efforts. MONSID has demonstrated its versatility through deployments on hardware testbeds at JPL, the California Institute of Technology, and the Air Force Research Laboratory.
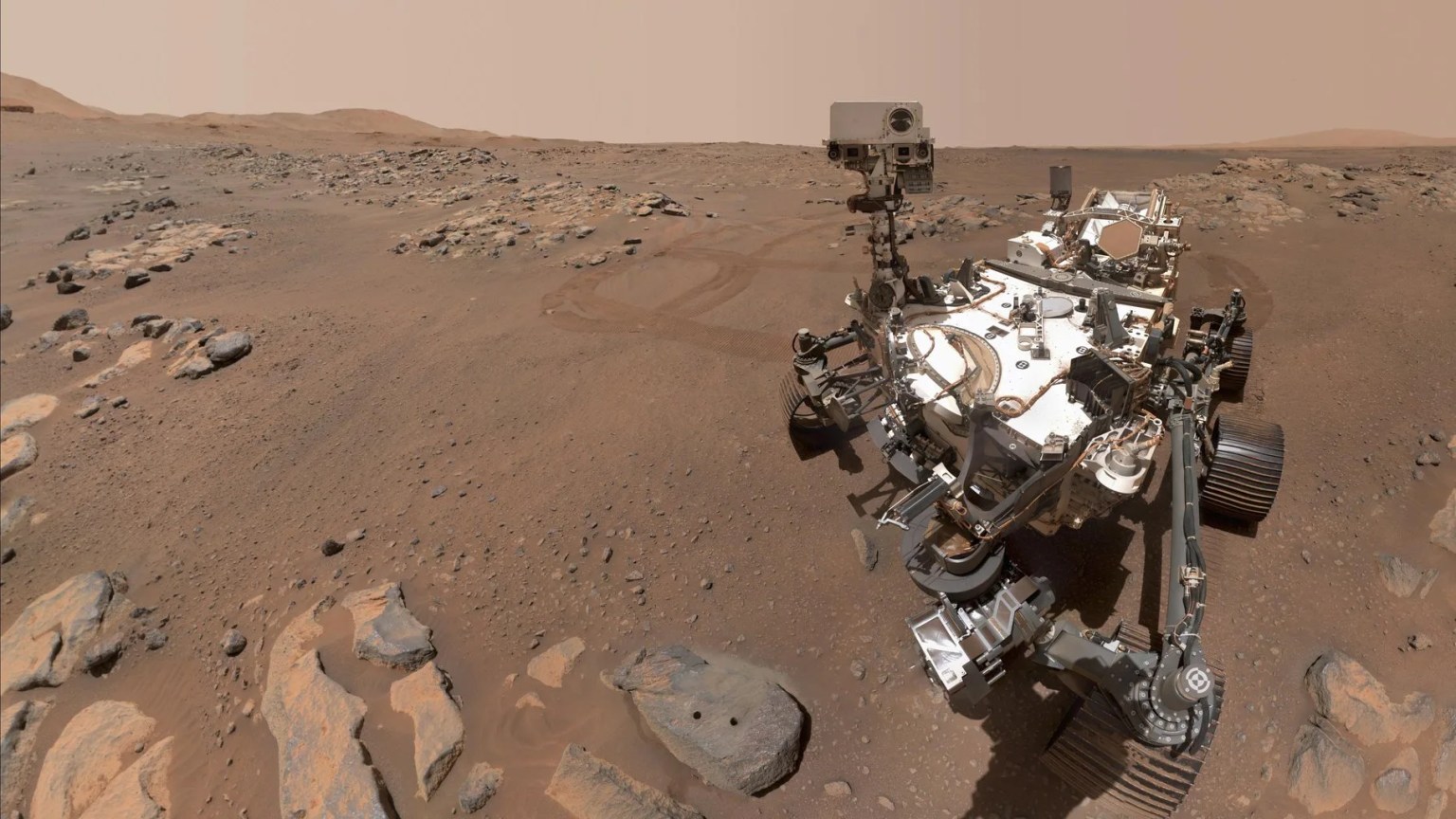
In one MONSID application, an engineering team led by Ryan Mackey at JPL worked with Okean Solutions to model the mobility system of Athena, a JPL development rover used to prove new robotic technologies (Figure 2). Modeling began as the rover was refurbished with new components, and tests with the upgraded rover yielded surprising results. The team conducted Athena rover test drives in the Mars Yard at JPL and compared data collected from the rover’s mobility system to predictions from the MONSID models. Several discrepancies were observed. Initially, the team suspected that the discrepancies were due to modeling errors, but further analysis revealed several new issues with the rover itself. These problems included mismatches in top-level motion commands versus position commands seen by the motor controllers; off-nominal responses to commands, resulting in arc motion when straight-line driving was commanded; and motor polarity mismatches between reported steer angle and commands, which resulted in having the motors sent back to the vendor for corrections. The remaining issues were resolved by updating the software and motor controller firmware on the rover, as well as tuning motor controller parameters. This exercise demonstrates how the MONSID model-based approach offers smarter, more autonomous capabilities to assess hardware health and performance, even as systems are developed before deployment.

Once the Athena rover was completed and checked for correct behavior, the team injected faults to simulate motor stalls and incorrect wheel commands to test MONSID performance under real-world conditions. For example, the team introduced a simulated bit flip that reversed the polarity of a command to one of the steering motors during a commanded drive along an arc (Figure 3). This condition resulted in one wheel turning to the right instead of the left, causing that wheel to drag across the Mars Yard. The rover telemetry data appeared fine despite the faulty command; in fact, the rover still reached its drive goal because the five other wheels compensated for the one that was dragging. In the Mars Yard, the engineers were able to visually see the wheel being dragged, but if the rover was on the surface of another planetary body, the fault would not show up in the telemetry data, making it difficult to detect, let alone diagnose. Left undetected, a dragging wheel could lead to severe wheel damage. Traditional limit-checking approaches would be challenged to detect this type of fault because all onboard measurements stayed within limits. By capturing the intended coordination between all six wheels, MONSID was able to detect and isolate this fault immediately, unlike traditional monitor-response methods for detecting faults. These results highlight the benefits of MONSID’s model-based approach. Using MONSID, engineers can ensure not only that the right system is built before deployment on its mission to a distant location, but that the hardware health can be autonomously assessed throughout the mission.

Currently, the JPL team is building MONSID models for deployment on two new robotic systems. The first, funded by NASA PSD’s Concepts for Ocean worlds Life Detection Technology (COLDTech) program, will diagnose the hardware of a robotic arm designed to scoop materials from the surface of icy worlds such as Europa and Saturn’s moon Enceladus. On a COLDTech task titled REASIMO (Robust, Explainable Autonomy for Scientific Icy Moon Operations), MONSID will be deployed on two robotic arm testbeds funded by NASA’s Planetary Exploration Science Technology Office (PESTO): The Ocean Worlds Autonomy Testbed for Exploration Research and Simulation (OCEANWaters) software testbed developed at NASA Ames, and the Ocean Worlds Lander Autonomy Testbed (OWLAT) hardware testbed developed at JPL.
For the second task, funded by NASA SMD through JPL’s Type II office, the MONSID team will prototype diagnostic models of spacecraft power and attitude control subsystems for NASA’s Lunar Flashlight CubeSat, scheduled for launch later this year. These models will support pre-launch testing of the spacecraft, with a vision to upload the MONSID models and engine during the extended mission after the primary mission goals have been accomplished. What began as an SBIR investment has now led to an opportunity for MONSID to truly spread its wings, as an in-space demonstration paves the way for autonomy to enable challenging and exciting new missions.
The research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004).
PROJECT LEAD
Dr. Lorraine Fesq, Jet Propulsion Laboratory, California Institute of Technology
SPONSORING ORGANIZATIONS
NASA SBIR Program, JPL Research and Technology Development Program, NASA PSD’s COLDTech Program, Air Force SBIR Program, JPL’s Type II Office