























Written by Ashley Stroupe, Mission Operations Engineer at NASA's Jet Propulsion Laboratory
Earth planning date: Wednesday, April 16, 2025
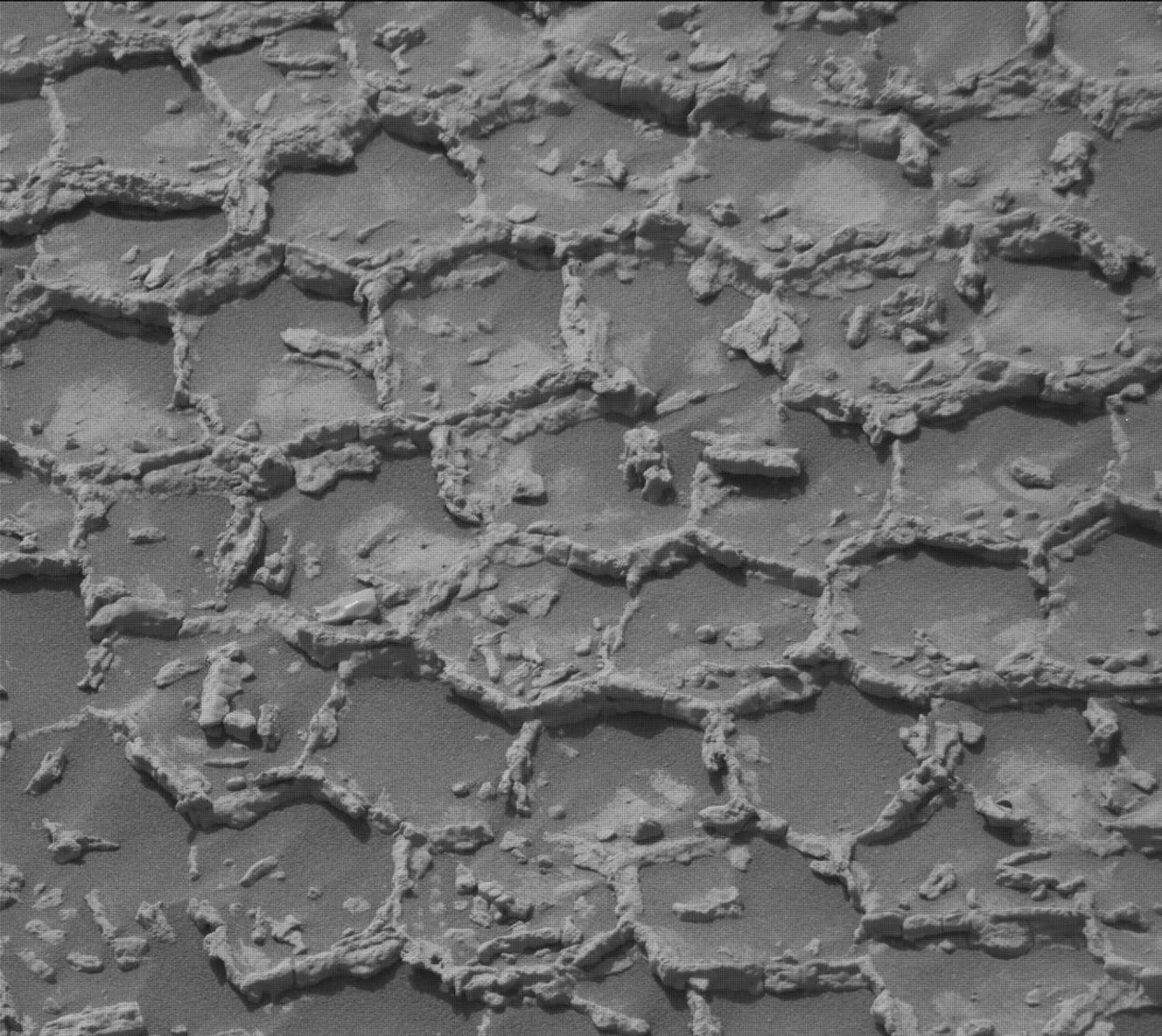
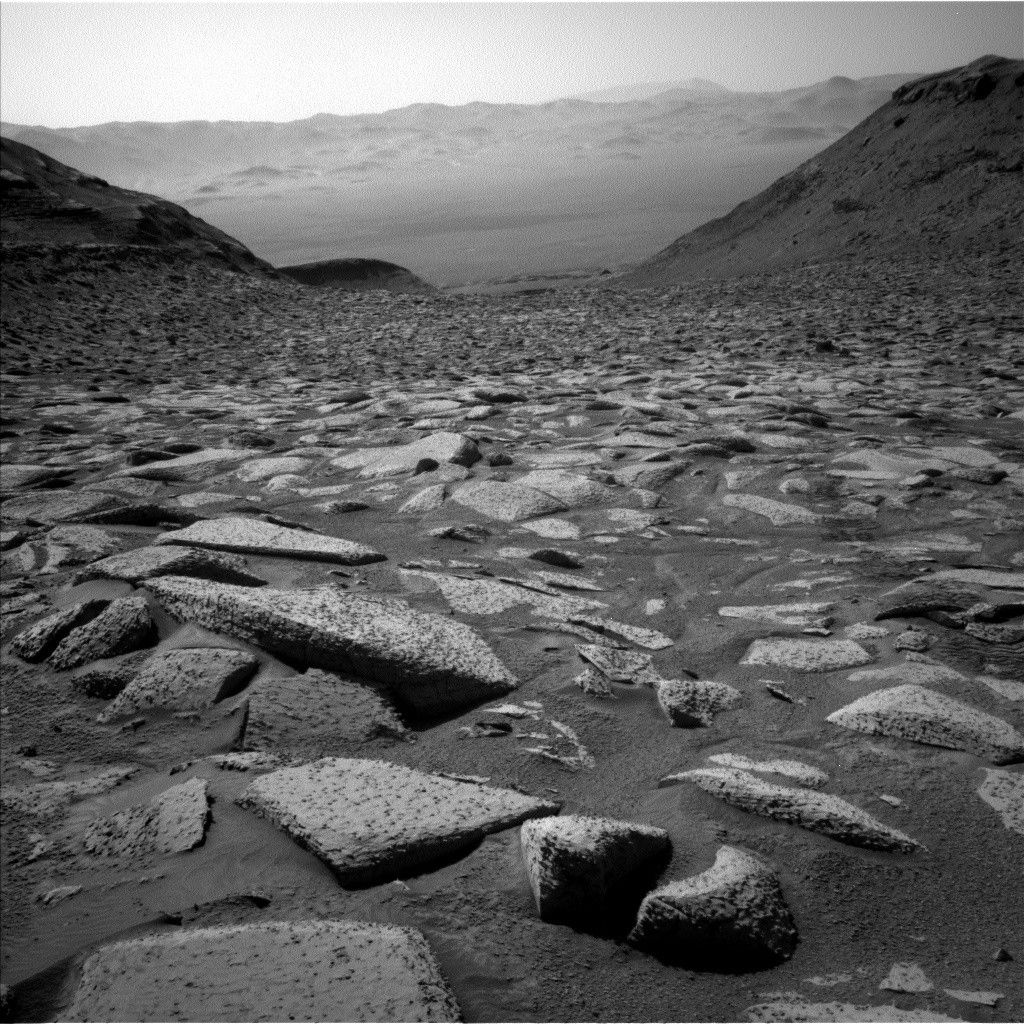
Coming into planning today we have this beautiful image looking back along the valley we’ve been climbing and all the way to the far Gale Crater wall. We get such great images like this in the winter because the air is more clear.
Now looking ahead, today we are constrained by power and needed to optimize our activities — putting things at times of day that need less heating, and even shortening the targeted science and arm activities. In our targeted science block, we are kicking things off with some atmospheric observations with Navcam — a suprahorizon movie and a dust-devil survey. We then take Mastcam images of several targets. “Red Cloud Canyon” is a distant canyon where we are tracing the orientations and textures of rock layers. “Devil's Gate” is the ridge to the north we drove around a few weeks ago. “Montecito” is an interesting small rock that may potentially be a meteorite. “Razor Point” is a wide light-colored vein in our workspace. We also look at a nearby trough. We follow up with a ChemCam LIBS and Mastcam pair on “Gaviota,” which is an interestingly shaped flake on top of a rock in our workspace, and finish with a ChemCam passive observation of Razor Point.
We were cleared to do arm work today, which has not been guaranteed in this very tough and rocky terrain. Our parking spot was lucky, and none of our wheels were at risk of slipping when we move the arm around. We are looking at two targets today. The first is “La Purisma,” which is a patch of ground with some pebbles that seem to have been eroded out of the surrounding bedrock. Again, we were lucky and even though this target is quite near a large rock, the turret is positioned just right to avoid risking collision with it as the arm moves to contact with the ground. We are looking at two spots with MAHLI and APXS so that the scientists can tease out the different compositions of the pebbles and the soil. We don’t like to place APXS on the ground where there is sand or soil, for fear of any particles sticking to the instrument and contaminating the sensor. We are using “proximity mode,” which is an autonomous behavior that allows the rover to place APXS very close to the ground without touching it, by sensing the distance to the surface. The second target is “Elephant Tree,” which is another highly eroded, layered patch of rock with embedded pebbles. This target was also tricky because of the roughness of the surface, so we will just be taking MAHLI images of it.
After a night of APXS integration, Curiosity will sleep in to recharge her batteries and then get right on the road. As with most of the drives of late, the terrain is very challenging with a lot of large rocks. We are able to drive a long distance, about 50 meters (about 164 feet), but it is a winding path to keep away from the largest and most dangerous rocks. We finish up with our standard post-drive imaging, a Mastcam solar tau (measuring dust in the atmosphere), and a Navcam sky survey. Hopefully at the end of this drive we will have enough elevation to see over the ridge and get a better sense of what the terrain will be like on the other side. Hopefully it will not be as rocky and challenging as what we have been driving on!