


![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)







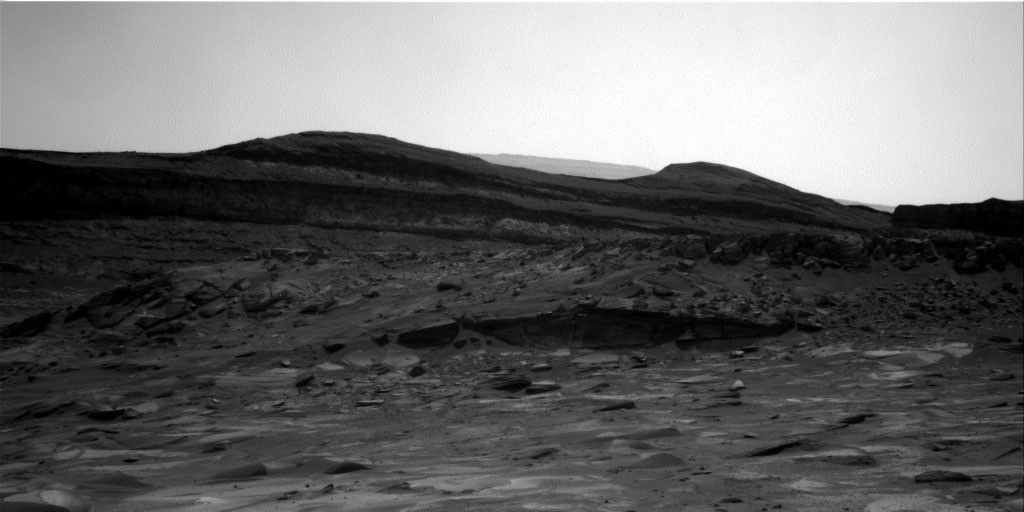
The MSL team was originally planning a long drive this weekend, but there was enough interest in the fresh rock surfaces exposed near the
rover
that we decided to investigate them instead. Before we could decide
whether to "bump" to the rocks that were broken when the rover drove
over them, we had to make sure they could be well imaged by MAHLI.
Taking MAHLI images of nearly vertical faces is difficult, because the
turret at the end of the arm must be placed close to the ground. While
the Strategic Rover Planner worked to find ways to get MAHLI close to
the fresh surfaces, we planned pre-drive remote sensing and arm
activities: On Sol 1341, ChemCam will observe its calibration target, a
bedrock target named "Kobos 3," and the wall of the Okoruso drill
hole. Mastcam will then provide context for the ChemCam observations
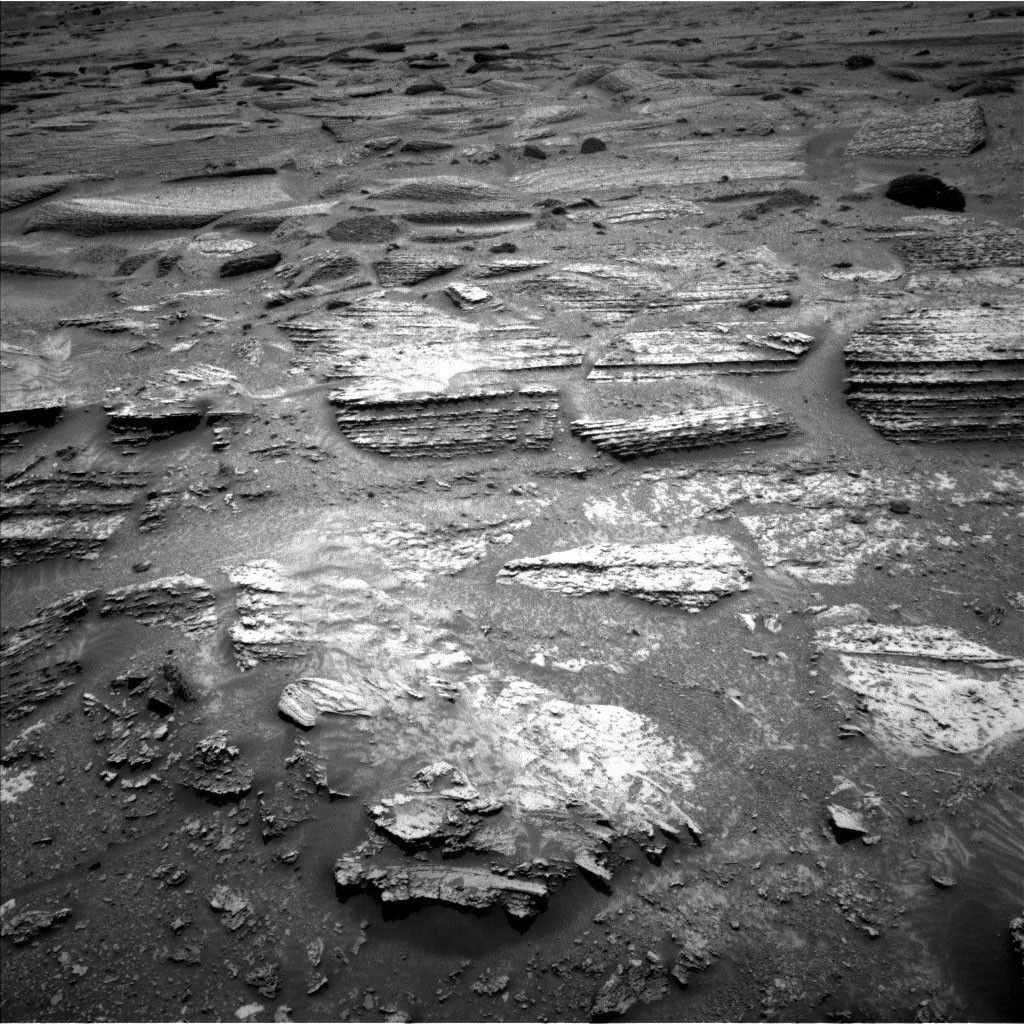
and take stereo mosaics of "Naob" and other bedrock near the rover.
Later that afternoon, the DRT will be used to brush dust off a brighter
layer in the bedrock, with MAHLI images taken before and after the
brushing. We also planned close-up MAHLI images on a nearby bedrock
target dubbed "Rooilepel" and a lower-resolution MAHLI mosaic of the
area including Mariquita. All of this MAHLI work made for a very busy
day for me as MAHLI uplink lead!
APXS will measure
the chemistry of the brush spot overnight, before another busy sol
begins. The arm will be stowed to allow a Mastcam multispectral
observation of the brush spot before the rover bumps over to the broken
rocks. During the drive, DAN will actively measure the subsurface
hydrogen content by turning on its neutron generator. After acquiring
post-drive images, the rover will take a nap before CheMin performs
another overnight analysis of the Okoruso drill sample. Early on the
morning of Sol 1343, Navcam will search for clouds and dust devils, and
Mastcam will measure the optical thickness of dust in the atmosphere.
Later that sol, ChemCam will use the newly-validated AEGIS software to
acquire LIBS measurements of an autonomously-selected target. Of
course, we are hoping that the software continues to work well! by Ken Herkenhoff
Dates of planned rover activities described in these reports are subject to change due to a variety of factors related to the Martian environment, communication relays and rover status.
Written by Ken Herkenhoff, Planetary Geologist at USGS Astrogeology Science Center