







.png?w=1024)












Curiosity is on the steepest part of Vera Rubin Ridge that it will encounter along its climb. The machine is performing superbly, having driven a 28 meter distance yestersol and having climbed 18 meters vertical elevation in four planning sols. The rover's current elevation is -4202 meters.
[Mars has far more extreme elevations than the continents on Earth, and it is reflected in the elevations of the landing sites to date. Curiosity landed at almost the same elevation as Viking 2 which landed in 1976 at -4.5 km. Curiosity may hopefully pass the elevation of Phoenix, which landed in 2008 at -4.14 km. The highest-elevation successful landing site to date was Opportunity, in Meridiani Planum, at -1.44 km. All elevations are measured relative to the mean planet radius.]
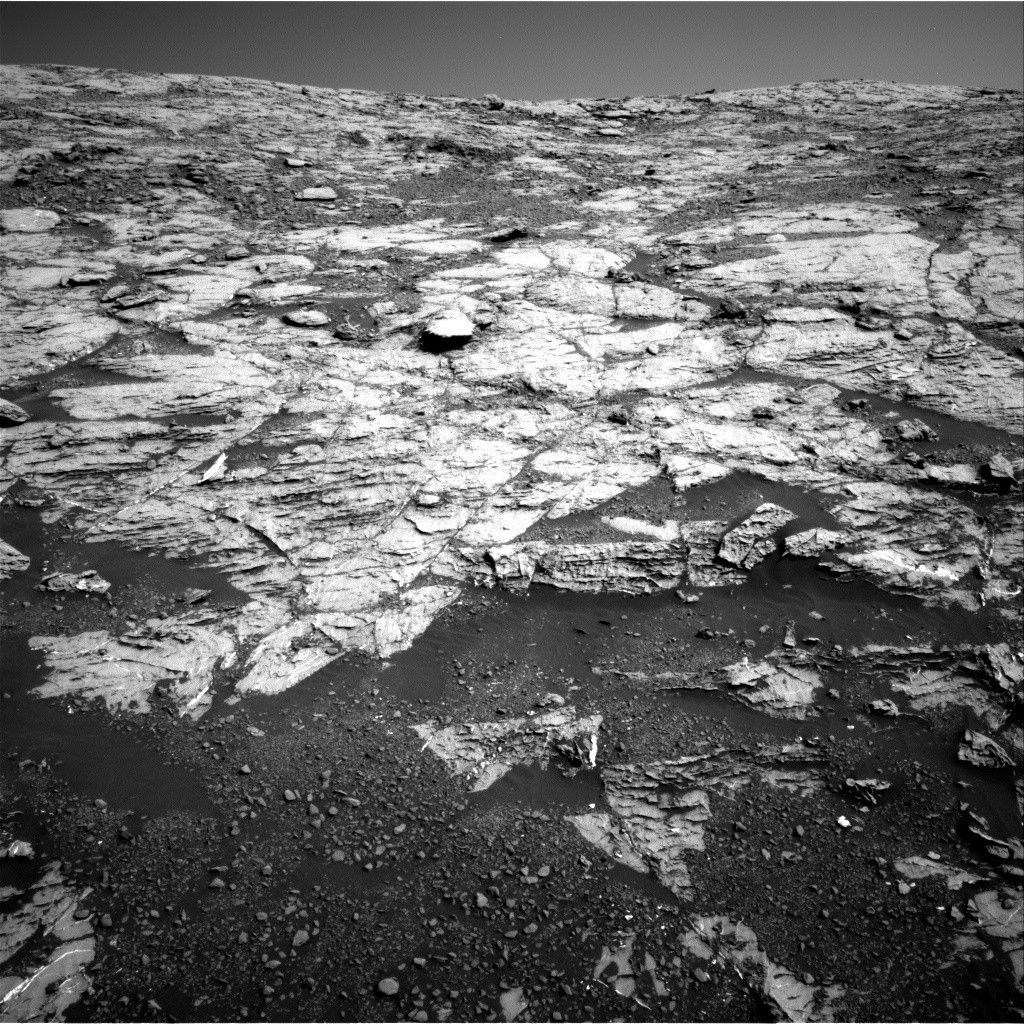
Curiosity now has great, unobstructed views across the lowlands of Gale crater to the rear of the rover. The view is improving as the air becomes clearer heading into the colder seasons. The first image link below shows a Navcam view into the distance past a cliff face just to the left of the rover. The image is tilted due to the unusually high 15.5 degree tilt of the rover as it climbs the ridge. Part of Mount Sharp is in the background. The second link shows an image looking ahead, where we see much more rock and less soil. The foreground shows that some of the pebbles are relatively well rounded. The rock face up ahead is smooth, which will mean easier driving.
Instrument activities for Sol 1809 include a DAN passive, a REMS Get Data, a RAD Get Data, a short APXS observation of "Chamberly," and four MAHLI images with stereo. ChemCam is shooting a 10-point linescan of "Chamberly" at 1.5 milliradian spacing, as well as 5-point linescans of "Locust Island Ledge" and, of all names, "Thread of Life Ledge." Mastcam is providing documentation of these targets as well as imaging "Scrag Island," "Wohoa Bay," and "Shutdown Mountain". Today's planned drive should be around 10 meters, taking the rover higher on the ridge. The second sol of activity includes a 360 degree dust devil survey with Navcam, Mastcam monitoring of the rover deck, and a new ChemCam target that will be self-selected by the AEGIS software. The rover will also image the work space around its new location.
Written by Roger Wiens, Geochemist at Los Alamos National Laboratory