Over the weekend Curiosity worked on a bold plan

to drop off a sample in the inlet of the CheMin instrument
. The sample, "Ogunquit Beach," is dune material that was collected at Stop 4 of the spring Bagnold Dune II campaign,
collected starting on Sol 1651
. The drop-off sequences included a vibration of CHIMRA, the sample processing hardware. These vibration activities were done to help move the loose sample material within CHIMRA, including into the portioning chamber. Because the use of vibration has been seen to affect the health of the drill, a test of the drill mechanisms also was performed. Vibration resulted in detectable changes to the mechanisms, so the rover automatically halted further use of the arm until further instructions from the ground were received. We see this drop-off as a good partial success, and a chance to learn more about the drill.
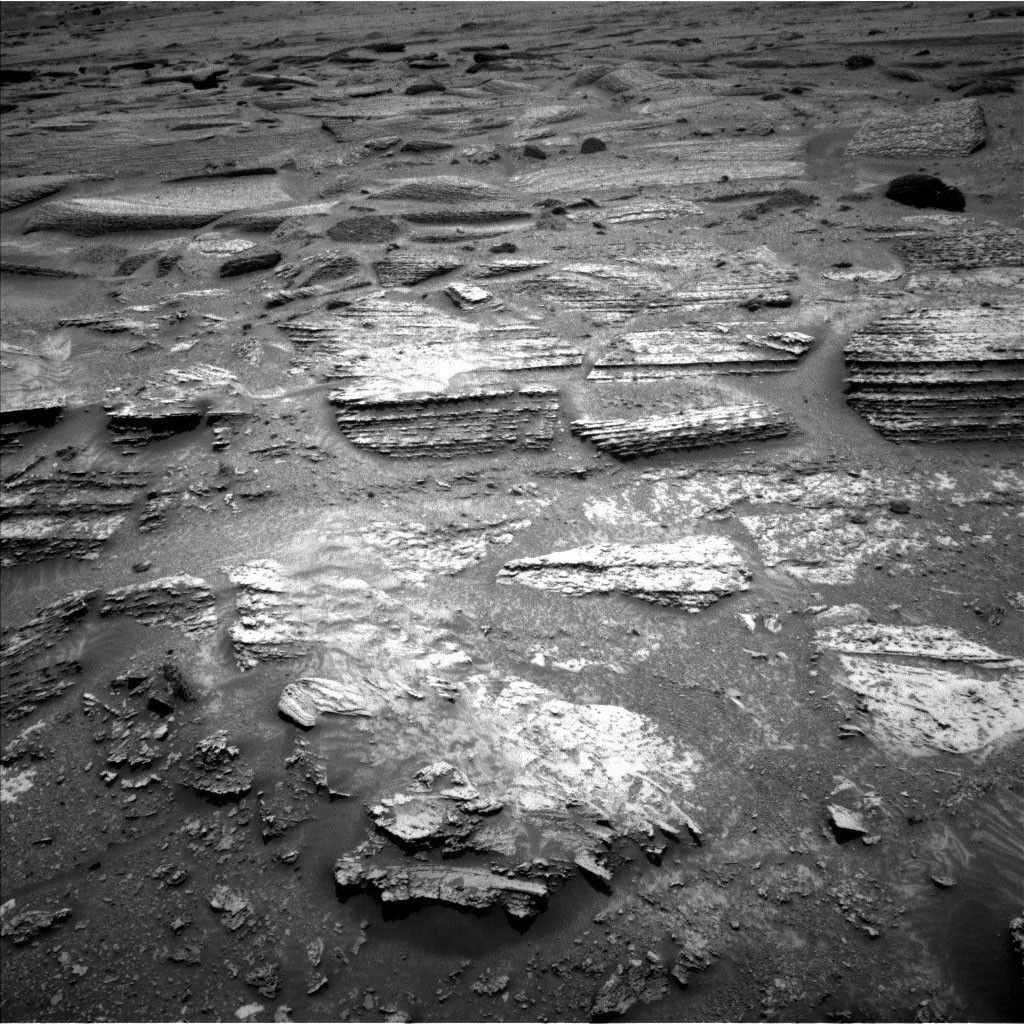
The team's operations today focused in part on returning the arm to normal operations. This includes approving the arm activities, doing some more drill diagnostics, performing some regular science activities, and then commanding a short drive. Following the results from Friday, we will be taking a second look at the float rock, "Normandien" (shown in the center of the Mastcam image), to be observed with ChemCam's spectrometers passively (no laser). Mastcam will be observing "Transvaal Extension" with a 3-image mosaic, and it will do some deck monitoring following the weekend sample drop-off. APXS and MAHLI will observe "Katberg," which was observed by ChemCam over the weekend. There will also be REMS and RAD activities, a DAN passive observation, and a Navcam dust devil movie.
After the drive, Navcam will do its usual imaging of the targetable region in front of the rover, Mastcam will continue a clast survey, MARDI will take an image of the region under the rover, and Navcam will take a 360 degree panorama.
Written by Roger Wiens, ChemCam PI