






















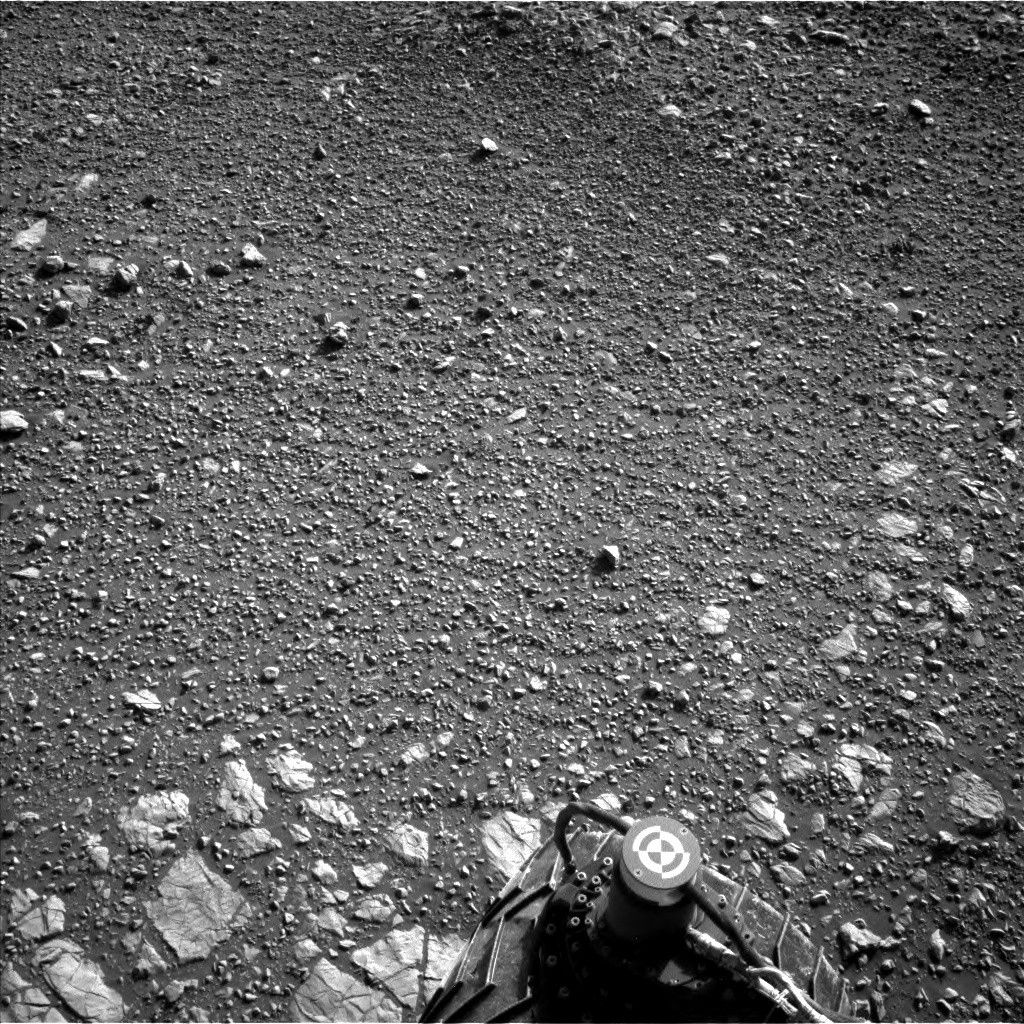
Since the start of our investigation of the Vera Rubin Ridge (VRR, a narrow and winding ridge that exhibits signs of oxidized iron phases from orbit), we've been primarily driving around on fractured bedrock material with a general lack of sand. This is unlike the landscape in the Murray formation at the base of the ridge, which was dominated by a combination of bedrock exposures and wind-mobilized sands. However, following Curiosity's drive two days ago, the team found a local landscape dominated by small cobbles and pebbles with an abundance of fine soil surrounding these fragments. We had planned to investigate this location based on both ground- and satellite-based observations due to its different appearance relative to the rest of VRR, but this was our first up-close glimpse of this different landscape.
The science team had a few decisions to make during today's planning session. There was time available to use the MAHLI (high-resolution imaging) and APXS (bulk chemistry) instruments located on Curiosity's arm to investigate the surroundings, and the team was able to choose to perform either a quick "touch and go" analysis (where we are able to drive away the same day as making the measurements) or a more detailed contact science investigation, where APXS would be used overnight and we would stay in the same location for a few days. Each option has pros and cons (including the number of targets that could be analyzed, the amount of driving that we can do in the near future, etc.), so the team started the day with this detailed discussion of these options and the geologic targets in front of us.
With such a heterogeneous landscape in front of us, there was a concern that APXS measurements (which have a large footprint relative to the pebbles in the workspace) would be difficult to interpret (i.e., determining which pebble(s) or soil are contributing to the chemical signatures), so the team decided to forgo any APXS measurements and instead use the finer-scale ChemCam chemistry measurements to characterize the observed heterogeneity. Curiosity will also analyze the landscape using multispectral Mastcam observations, which can provide additional information about the observed compositional diversity. This will allow the rover to drive off later that same day without the need to stick around. Once this decision was made, the science team then took to selecting targets of interest to analyze.
ChemCam will analyze two locations near the rover to determine the compositional variability. The first target, "Blinkberg," is a pebble-rich region near the rover, and ChemCam will be used to measure several pebbles and soil patches surrounding this target. Investigation of the second target, "Wolkberg," will consist of measuring a larger clast and the surrounding soils. These observations will hopefully inform the team about any compositional variability observed in the pebbles that are strewn about the region.
Mastcam will then take over to acquire high-resolution imaging and multispectral observations. Mastcam will first turn to imaging the horizon just south of the rover, towards a region of interest for studying the nature and structure of the VRR. Next, Mastcam will image the "Blinkberg" ChemCam target and the surrounding area using all of its multispectral filters, which will help to characterize any observed compositional variations. Then, Mastcam will perform a similar observation of the "Wolkberg" ChemCam target and the surrounding region known as "Zeederberg." Curiosity's arm will then be unfurled, and she will use the MAHLI high-resolution imager to investigate the "Blinkberg" target, hopefully helping to constrain the grain size of the pebbles and sediments in the acquired scenes.
After this region has been extensively studied, Curiosity will continue her drive towards the south. Following this drive, Curiosity will document her surroundings using her navigation cameras, Mastcam will image the surroundings to characterize the nearby soils and rock clasts as well as imaging the rover deck, and ChemCam will make an automated chemistry observation of nearby bedrock and will calibrate its imaging system.
Today's science planning was a great example of how "nimble" the science team can be. The team started its discussion with several options on the table and was able to quickly assess the rover's surroundings and make the best decision possible to analyze these surroundings, keeping the broader scientific objectives and goals in mind. It's often said that getting scientists to agree with each other is comparable to "herding cats," but today was certainly not one of those days!
Written by Mark Salvatore, Planetary Geologist at University of Michigan






