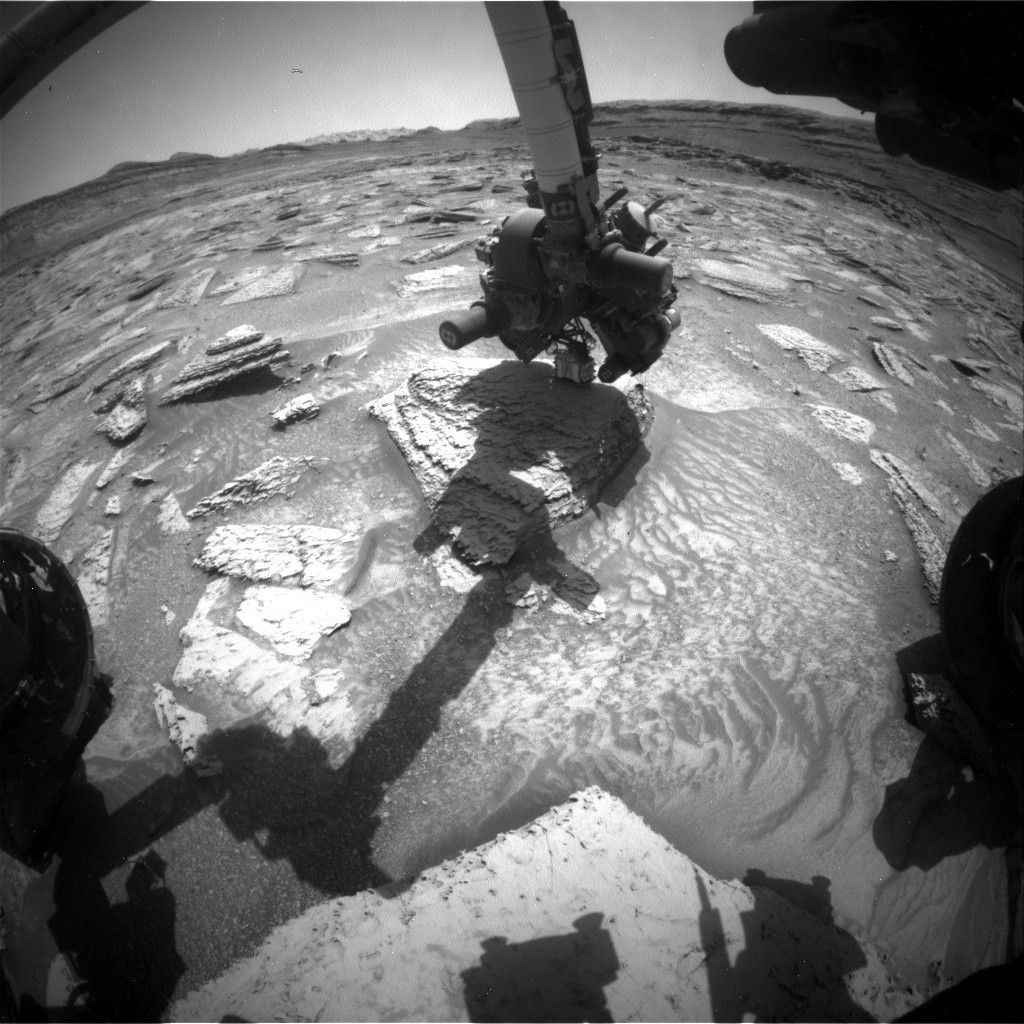


















Today Curiosity is doing a little bit of everything: some contact science, some targeted science, and a little driving. When we started planning this morning, we had a beautiful view of the small ledge in front of us, named “The Prow,” which shows some amazing layering. We also can see some disturbances in the sand that may be sliding caused by our approach.
We, the rover planners, were busy today despite the plan looking deceptively simple. The face of “the Prow” itself is just a bit out of reach, so instead we are doing some APXS integrations on a small loose rock target called, “Ilu,” which is also visible in the sand in the bottom of the image. Rocks this small can be a little tricky because there is some uncertainty when we place the arm, though we have developed a lot of techniques that help us to get it right.
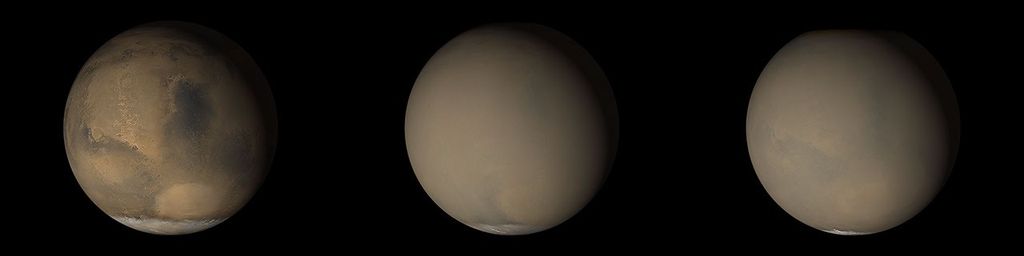
The science team was also busy today. Once the APXS is complete and the arm is safely stowed again, we have a long set of targeted science observations with Mastcam, ChemCam, and Navcam. We are taking a large mosaic (including extensive stereo) of The Prow as well as imaging Ilu. We are using ChemCam LIBS to examine “Tramen,” and RMI to image “Contigo,” which are both on The Prow near our expected next contact science area. ChemCam is also doing RMI imaging of “Mirador,” which is a butte about 15m south. We are also continuing to monitor the increasing dust in the atmosphere with Navcam observations of the horizon and a Mastcam solar tau.
The drive today is going to move us closer to The Prow so that we can do contact science on it in the next plan. While the drive is only a little over a meter, it is also a bit tricky. The Rover Planners needed to test out different potential parking spots to find the best place from which to place the arm, which took some iteration. We will have to get very close to the ledge to be in the best spot to place the arm, but we also need to be careful to not get too close and let the wheels start climbing over the ledge. We are creeping up on it in small steps, each time the rover will check how far away it is in order to choose the next step.
Written by Ashley Stroupe, Mission Operations Engineer at NASA's Jet Propulsion Laboratory