![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)








Earth planning date: Tuesday, January 16, 2024.
After a long holiday weekend, Curiosity is back hard at work. The first sol of the plan begins with some spectroscopy and imaging. ChemCam LIBS is doing a 5-spot observation of the target “Rovana,” which is a bedrock target. We then take a 10-frame RMI of “Texoli,” which is a layered butte to the south of the rover. Mastcam also images Rovana, as well as taking mosaics on two fractured bedrock blocks, “Shepherd Creek” and “Richter Creek,” and “Incense Cedar,” which is a polygonally fractured block in the direction in which we are heading. Navcam also takes some atmospheric observations, including a dust devil movie and a line-of-sight image.
After a few hours of napping, Curiosity will be ready to get her arm exercise in. There are two types of blocks in the workspace – one which looks smooth and the other that looks layered (laminated). The Science Team requested brushing and looking at both types of rock. They are hoping to be able to measure grain size, which helps us understand how the rocks were formed. The Arm Rover Planner had a very challenging time finding spots on both types of blocks that were smooth enough that we could brush them to clean them off. Ultimately, with the help of another Rover Planner, suitable targets were found for each rock texture, though the brush on the laminated target had to be centered on some smaller, less prominent lamination to be safe. The unlaminated target is named “Sheelite,” and “Dorst” is the name of the laminated target. Both targets will be brushed prior to taking MAHLI images and evening APXS integrations. After all the arm observations are complete, the rover will stow the arm to be ready to drive on the next sol and go to sleep.
The next morning, on sol 4071, Curiosity kicks off almost 8 hours of DAN passive measurement in parallel with more spectroscopy and imaging. ChemCam uses LIBS to observe the Dorst contact science target, and then takes RMI mosaics of Incense Cedar and “Aspen Springs,” which is a distant target that may have an exposed vertical stratigraphic section, showing a longer period of history at that location. Mastcam follows up by imaging Dorst, and then Navcam takes a suprahorizon movie to monitor atmospheric conditions. Finally we take a Navcam high-resolution 6x1 mosaic as an experiment to combine with the Mastcam M100 to get both stereo and color.
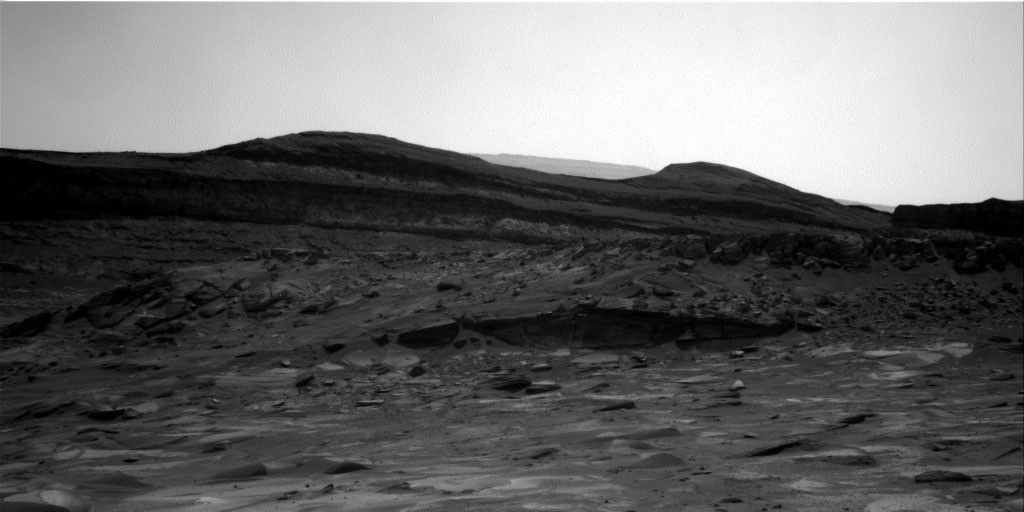
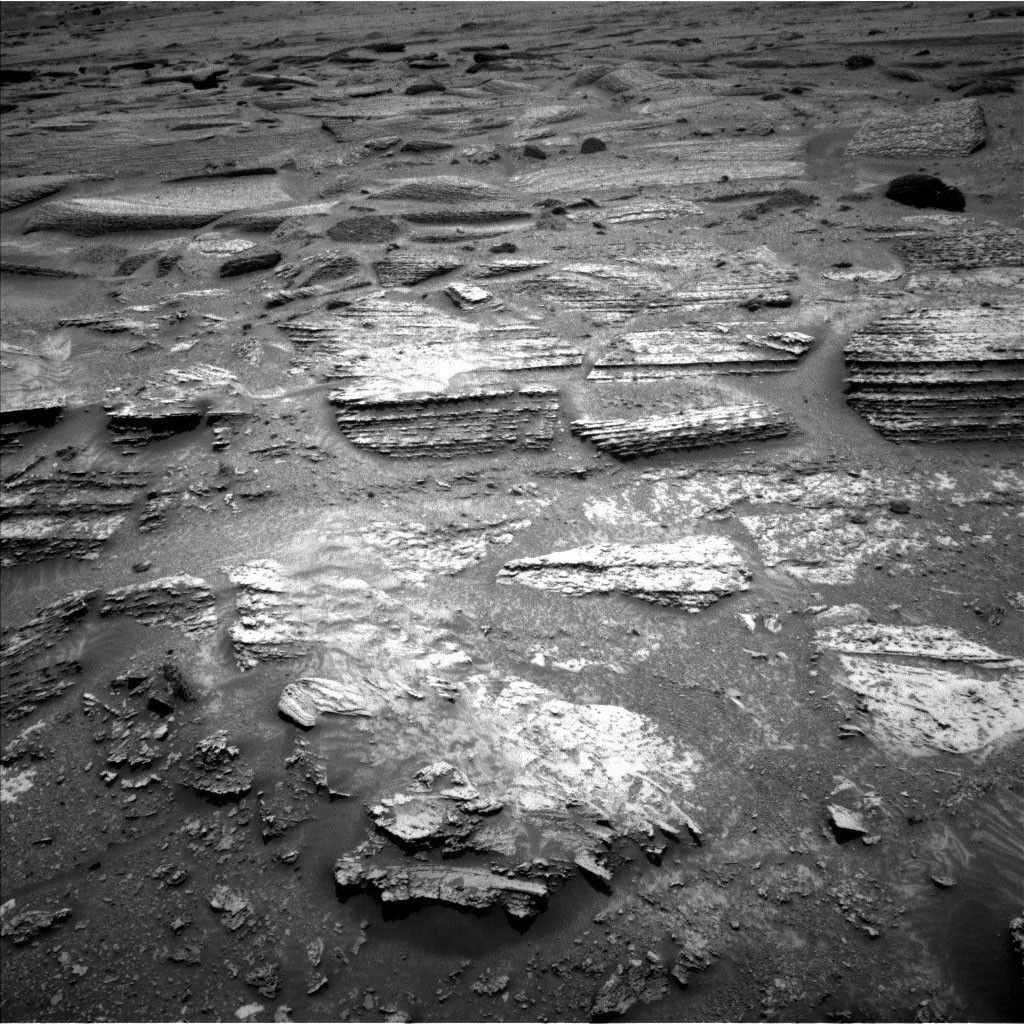
Next, Curiosity gets on the road, driving toward a nearby block that is our next contact science target. The block is part of the “Painted Lady” area which has a lot of polygonal features in the rock. The included image shows the area into which we are driving. The terrain here continues to have a lot of larger rocks and a lot of small pointy rocks that can damage Curiosity’s wheels; there is also a bit of a slope and some sand. Even though the rock is only 7m away from us, the difficult terrain is forcing us to take a less-direct, longer path.
After the drive, we take our standard post-drive imaging to look at our new workspace and the direction of the next drive. We then do a three hour Navcam atmospheric observation, which we hope might catch a dust devil in the late afternoon. We drop in this observation when we want the rover to stay awake to keep her from overcharging her batteries. After a twilight MARDI image of the ground underneath the rover, Curiosity sleeps for the night.
On the last sol of the plan, we have a short block of untargeted science. We’re taking a ChemCam AEGIS observation to autonomously look for something interesting nearby as well as some Navcam atmospheric line-of-sight imaging.
Written by Ashley Stroupe, Mission Operations Engineer at NASA's Jet Propulsion Laboratory