



![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)








PROJECT:
Ocean Worlds Signals Through the Ice (STI)
SNAPSHOT:
The Ocean Worlds Signals Through the Ice (STI) team is developing communication technologies to enable subsurface exploration of ocean worlds where conditions may be conducive to life.
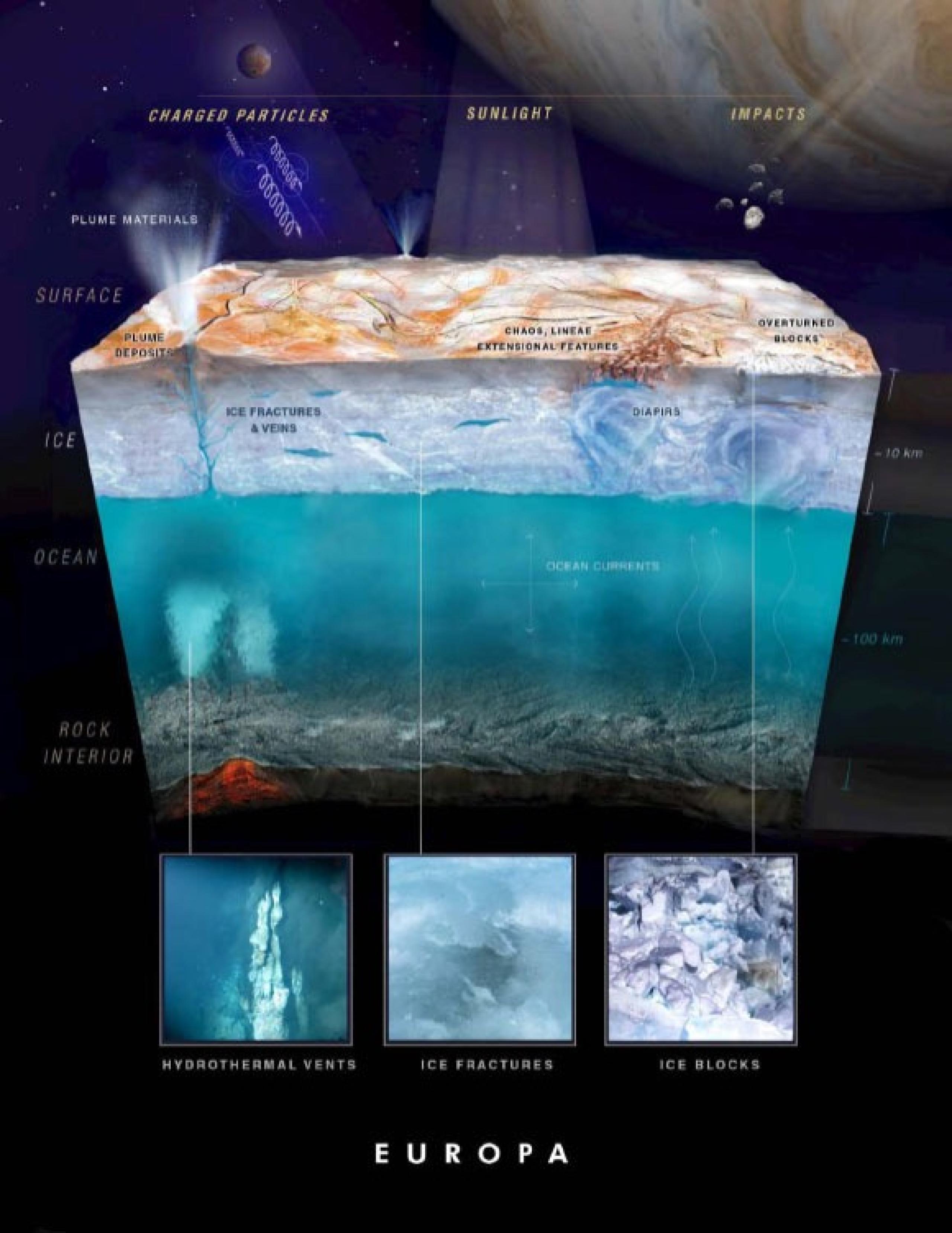
Detection of extraterrestrial life would be an incredible discovery, revolutionizing humanity’s perception of life and providing us insight into how life begins and persists in various environments. Exploration of ocean worlds such as Europa and Enceladus—orbiting Jupiter and Saturn, respectively—is particularly intriguing, as they may harbor conditions conducive to life including liquid water, essential chemistry, sources of heat or energy, and long-lived oceans.
To follow up on detections of habitable environments obtained by previous missions (e.g., Cassini), future missions to detect life on icy ocean worlds will require more than only remote observations. Deep subsurface exploration reaching the moons’ oceans and/or water pockets perched in the ice shell could reveal, as well as characterize in detail, any life that may exist there.
Accessing the subsurface ocean or melt pockets perched within an ice shell will pose significant challenges. From a technological perspective, a successful exploration mission will require starting in a vacuum at extreme cold (“cryogenic” temperatures), penetrating tens of kilometers through an ice shell for a few years, and accessing the ocean—all while maintaining communication with assets on the moon’s surface to transmit data back to Earth. The journey through the ice will entail navigating through an ice shell with unknown temperature variations, material strengths, and possible caustic compositions, and will require the capability to survive stress caused by tides and potential fault movement (i.e., ice-quakes).

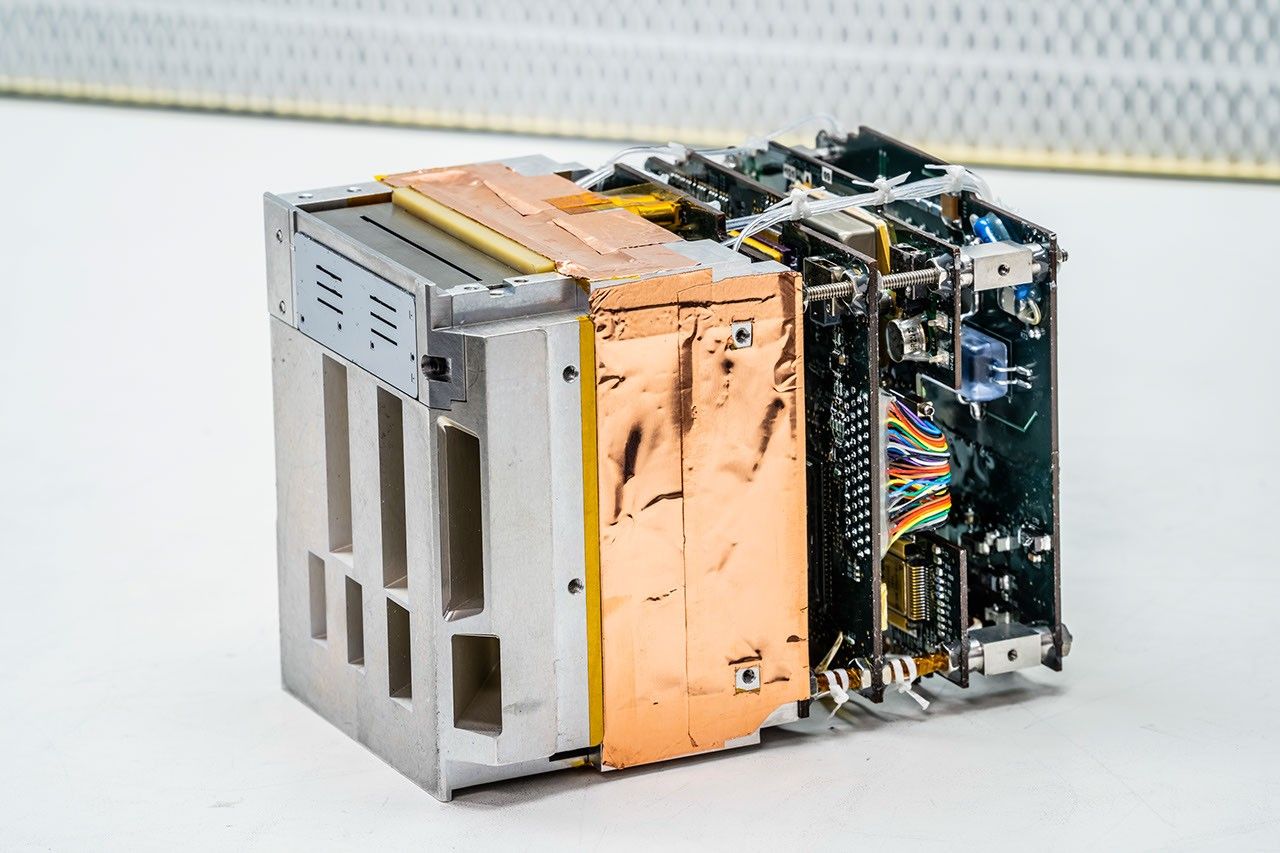
To date, a robust technology concept has emerged for effectively exploring the interior of ice shells: the ice penetrating robot, or “cryobot” (see Figure 2). A cryobot penetrates through ice by melting or excavating ice (and non-ice contaminants) using melting, cutting, or a hybrid method. Terrestrial ice probes have been proposed and/or developed for decades, with laboratory and field testing in Antarctica and Greenland to explore the viability of the concept for future planetary missions. To improve the mission readiness of such an ice-ocean probe, the STI team is developing robust communication technologies that employ optical tethers and free space radio frequency modules capable of transmitting data through multiple kilometers of ice while surviving the extreme conditions found on ocean worlds.
Europa: Extreme Cold & Extreme Loads: Submersible robots using hardy fiber optic micro-tethers (diameters ~1-2 mm) that are of sufficient length and mass to support the proposed Europa cryobot architectures have been successfully employed on Earth for terrestrial ocean exploration. However, the ability of these systems to withstand the extreme, in-ice conditions on Europa has not been demonstrated. Therefore, the multi-disciplinary STI team developed new protocols and instrumentation to assess the capabilities of optical communication tethers under the stress and thermal conditions (100 - 260 K) expected in Europa’s icy shell. The team applied shear loading at these temperatures for a range of loads and loading rates to simulate creeping and quick-slip ice-quakes anticipated in the ocean world ice shell environment.
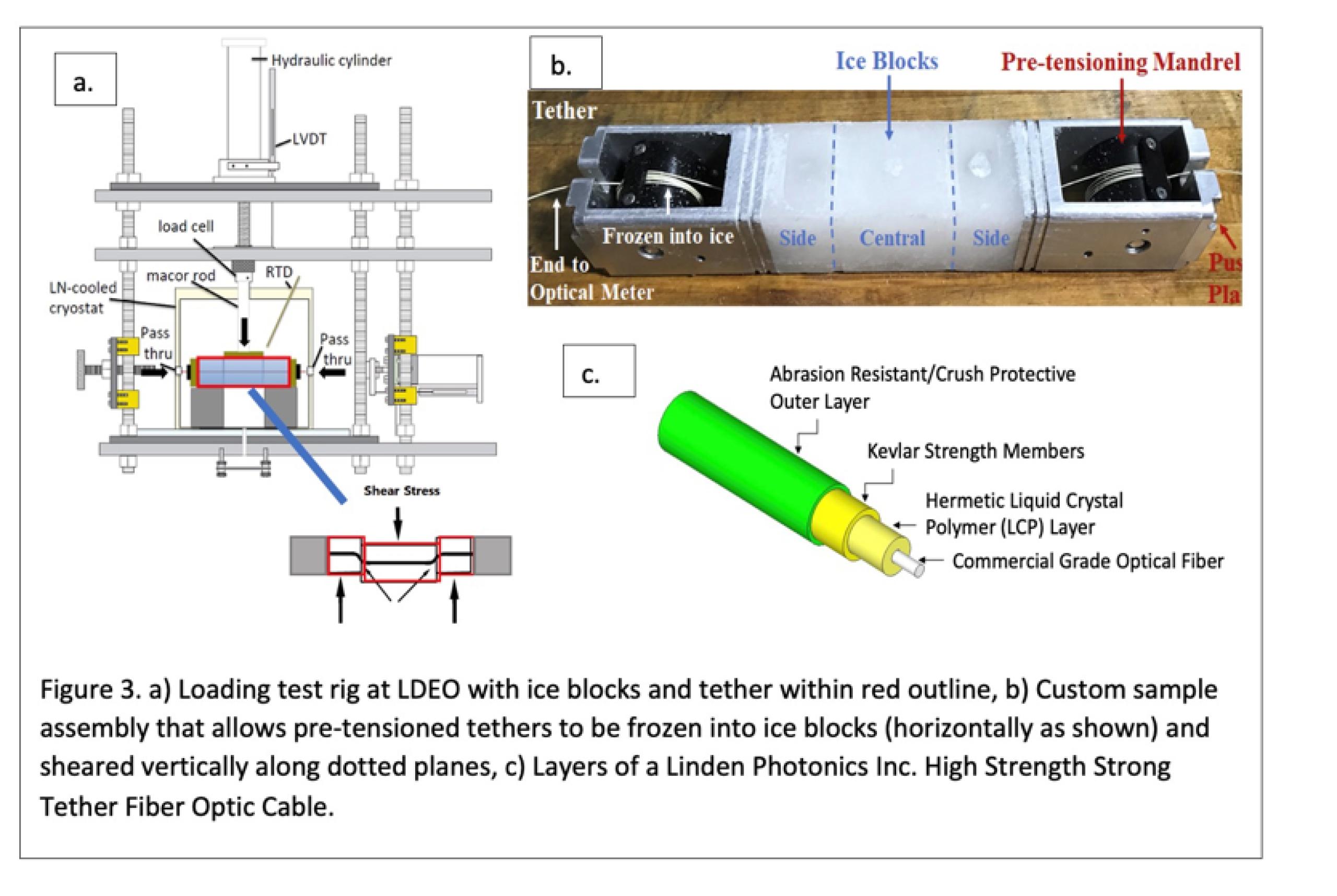
The STI team performed these tests using a cryogenic biaxial deformation apparatus at Lamont Doherty Earth Observatory (LDEO) (see Figure 3a). By testing in a laboratory setting that simulates a relevant ocean world environment, the team characterized two tethers’ shear strengths under conditions similar to ice faults on Europa. The team used a state-of-the-art, three-section die to apply pretension to the tether (see Figure 3b), around which a polycrystalline ice sample was frozen, with two pre-existing plane separations to represent perpendicular faults the tether may cross (dotted lines, in Figure 3b).
This die protocol proved to be a reliable method for creating ice samples with tethers pre-tensioned and fully embedded, and demonstrated a valuable new test preparation technique to the science community. Figure 3c shows one of the tethers tested, the Linden High Strength Strong Tether Fiber Optic Cable (HS-STFOC), and the layers of protective material surrounding the optical fiber through which data is transmitted. The changes in optical integrity and signal strength observed during testing indicate how capable the tether would be in various regions of Europa’s ice shell.
Shear test results demonstrated a surprisingly high level of tether robustness across the range of temperatures and ice fault slip velocities expected on ocean worlds like Europa and Enceladus. The fault slip velocities were controlled by the loading rates applied. Figure 4b shows the peak stress survived by the two particularly robust tethers tested: Linden Photonics Inc. Strong Tether Fiber Optic Cable (STFOC) and Linden HS-STFOC, which survived peak stresses up to 1.5 MPa within the fault slip velocity range of 5x10-7 to 3x10-4 m/s.
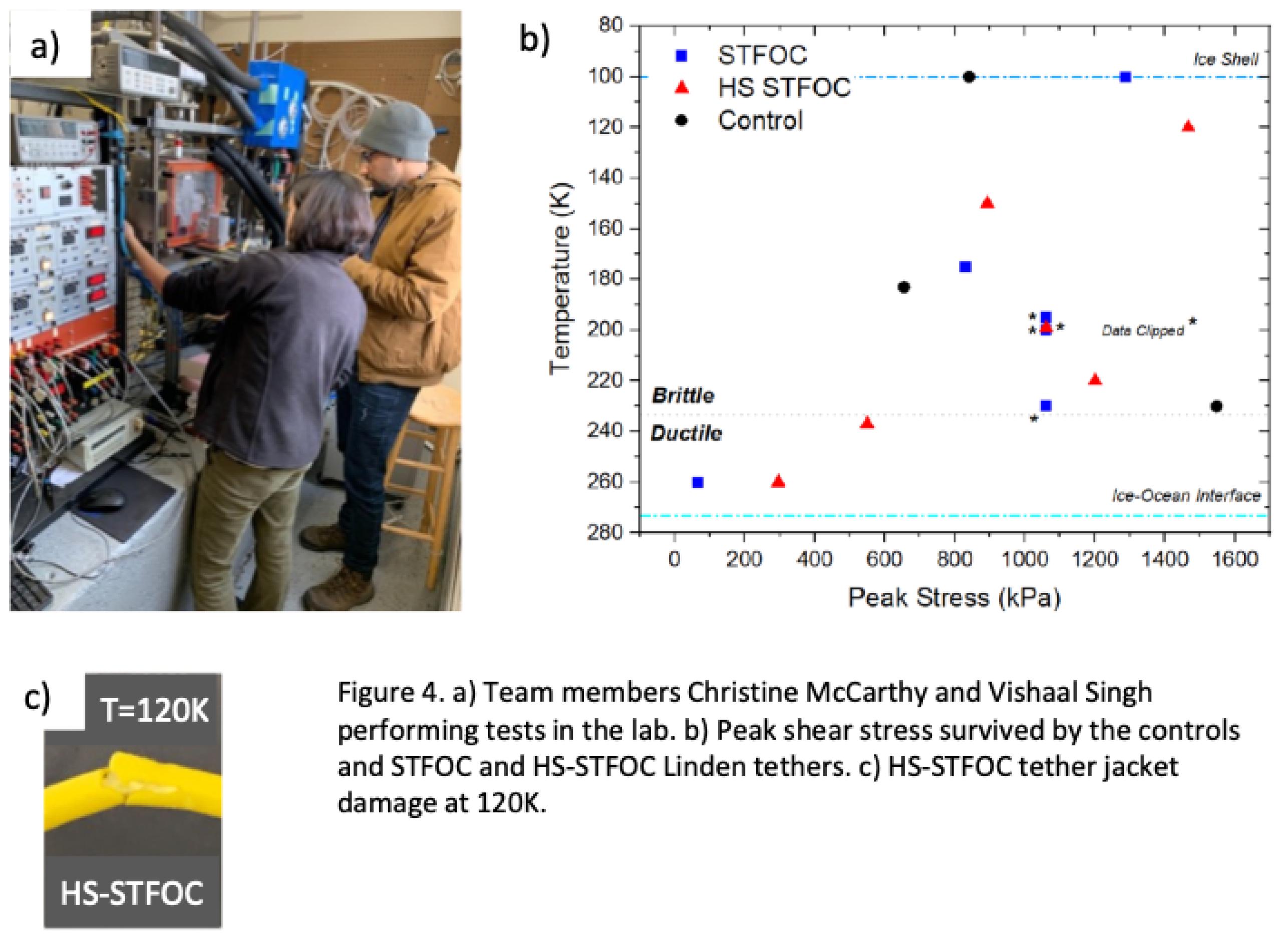
However, despite surviving the range of creeping strike-slip and ice-quake shear events at the coldest temperatures (~100 K) and maintaining optical communication throughout the tests, the team noticed some damage to the outer jackets of the tethers and stretching of inner fibers (e.g., Figure 4c), indicating a need for further tether development, which is currently being pursued under the Planetary Science Division’s COLDTech program.
The STI study—with crudely broken and imperfectly planar sliding ice interfaces (likely similar to reactivated faults on Europa) across these fault slip rates, shear loads, and ice shell temperature ranges—provides robust confirmation of how the frictional stability of ice depends on temperature and fault slip velocity. These findings are significant for potential application on Europa, suggesting a variation of sliding behavior with depth. The uppermost and lowest portions of the ice shell slide smoothly (and slowly), whereas at a mid-range in temperature and depth, icy faults could initiate stick-slip, rapid ice-quake events. By characterizing data transmission in these conditions, the tests show that tethers could potentially serve as science instruments to detect ice-quakes and establish the thermal profile of the ice shell.
These developments and others by the STI team are advancing tethered and free-space communication technologies to retire technical risks for a cryobot mission to access ocean worlds. STI efforts are also improving the ability to probe the temperatures and mechanical and compositional properties of dynamic ice shells, and guiding future technology developments for subsurface exploration of ocean worlds.
PROJECT LEADS:
Kathleen Craft, JHU Applied Physics Laboratory (JHU APL); Vishaal Singh, Lamont Doherty Earth Observatory (LDEO), Columbia Univ.; Christine McCarthy, LDEO; Michael V. Jakuba, Woods Hole Oceanographic Institute (WHOI); Matthew Silvia, WHOI
SPONSORING ORGANIZATIONS:
Planetary Science Division SESAME and COLDTech Programs