






















Technology Infused: The Mars 2020 mission has recently adopted a baseline that includes SMD-sponsored technology developments that will enable its rover to drive faster, more safely, and with improved energy efficiency. Planetary rovers have traditionally been limited by the available computational power of space-qualified processors. For example, when the Mars Science Laboratory (MSL) rover drives autonomously, its limited computation capability forces it to stop for a substantial period while the navigation software identifies a hazard-free path using acquired imagery. The resulting limitation on driving duty cycle reduces the MSL rover’s average traverse rate.

FastTraverse leverages newly available avionics—large, reprogrammable, radiation-hardened Field Programmable Gate Arrays (FPGAs)—to enable faster and higher resolution image processing. A synergistic set of software changes enables navigation processing and driving to occur simultaneously. In other words, a rover using FastTraverse technology will be capable of “thinking while driving.” FPGAs are inherently well suited to massively parallel computation in general, and to enabling the computer vision required by rovers in particular. The FastTraverse project has transitioned the most computation-intensive portions of autonomous navigation processing from the rover’s main central processing unit to an FPGA coprocessor. FPGA implementation enables higher resolution processing in a small fraction of the time required by general-purpose, space-qualified processors. What currently takes many seconds or even minutes using state-of-the-art, radiationhard processors can be accomplished in milliseconds using FPGA implementations.
Impact: By enabling faster and higher-resolution image processing, FastTraverse will reduce, if not eliminate, the need for the rover to halt while performing the processing associated with autonomous rover navigation, thus enabling continuous traverses. Using the FastTraverse technology, the Mars 2020 rover is expected to be able to travel 60-80 meters/hour—much faster than the current rover rates of 15-35 meters/hour. In addition to increasing traverse rates, FastTraverse technology enables safety checks to be run more frequently and reduces the total energy required for the rover to navigate to a goal, thereby leaving more time and energy for science.
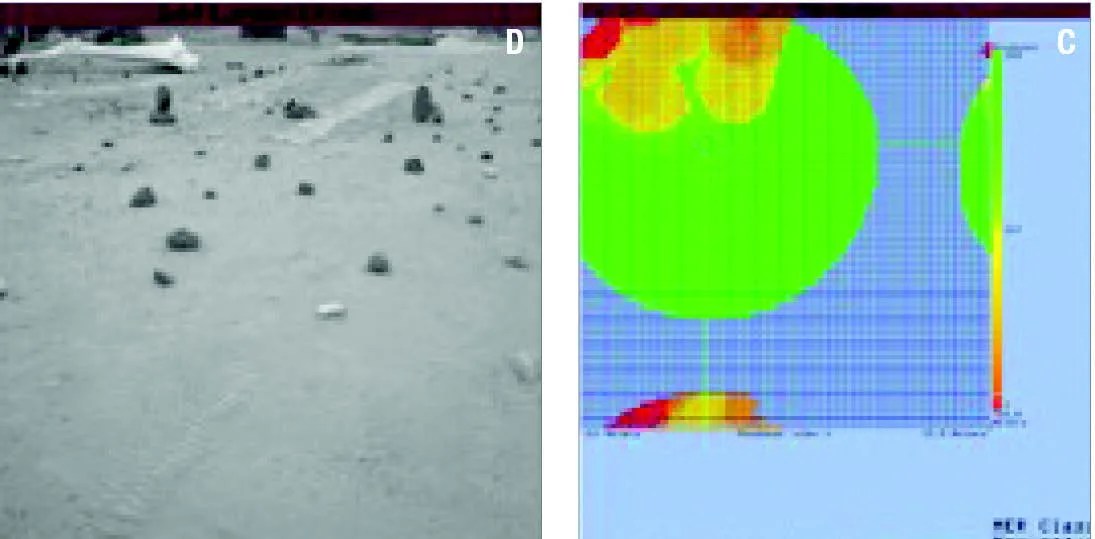
Status and Future Plans: In 2015, FastTraverse was integrated with and demonstrated on MSL’s Vehicle System Testbed, performing autonomous navigation in JPL’s outdoor MarsYard facility. The FPGA–enhanced capabilities demonstrated included hazard detection/ avoidance and visual odometry (determination of rover position and orientation by analyzing acquired images). The Mars 2020 flight mission will incorporate FastTraverse technology into its rover, further maturing the technology as needed.
Sponsoring Organization: FastTraverse was enabled by two SMD-funded technology programs, both led by Michael McHenry at NASA JPL. Work on FastTraverse progressed under the Mars 2018 Focused Technology Program in fiscal years (FY) 2011-12, while the technology was at lower TRLs, and starting in FY2013, the Mars Technology Development Program raised the TRL to a higher level to enable infusion in late FY2015.