




















InSight Spacecraft
InSight Lander
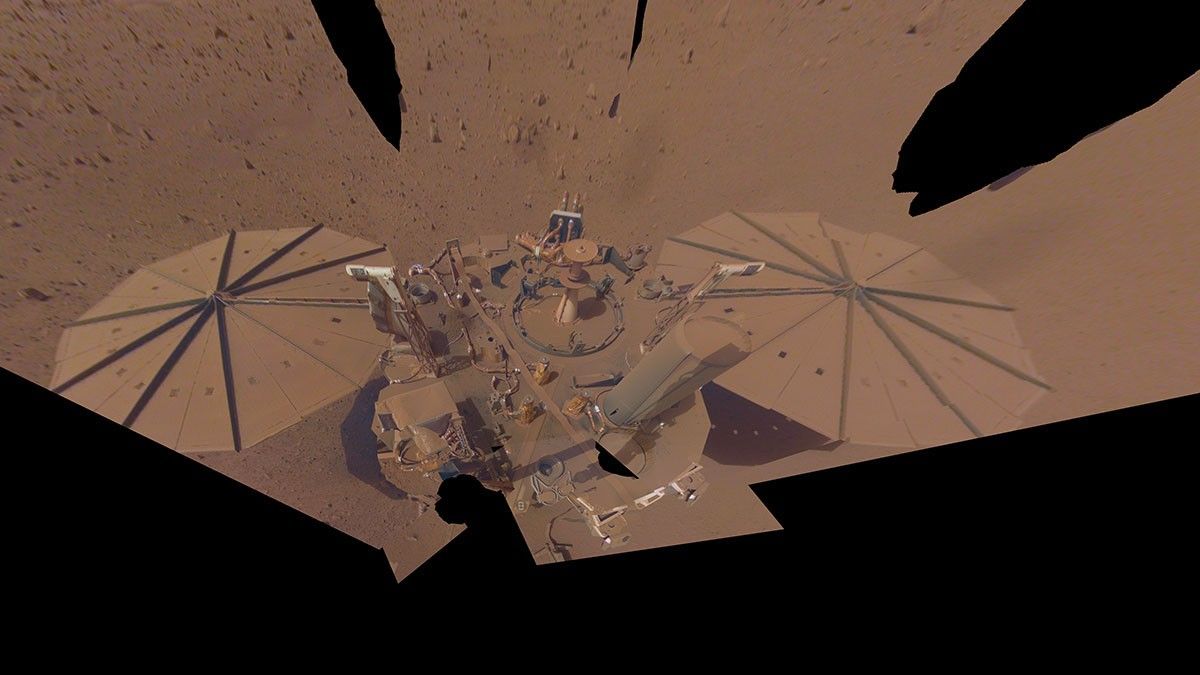
NASA's InSight lander was built on the proven design of NASA's Mars Phoenix lander. InSight's robotic arm was over 5 feet 9 inches (1.8 meters) long. It lifted a seismometer and heat flow probe from the deck and placed them on the surface. The camera on the arm provided color 3D views of the landing site, instrument placement, and activities. Sensors measured weather and magnetic field variations.
Lander Tech Specs
| Length | 19 feet 8 inches (6 meters) with solar panels deployed ("wingspan") |
| Width | 5 feet 1 inch (1.56 meters) (lander deck diameter) |
| Deck Height | 33 to 43 inches (83 to 108 centimeters) |
| Length of Robotic Arm | 5 feet 9 inches (1.8 meters) |
| Weight | 794 pounds (360 kilograms) |
| Electrical Power | Two solar panels, about 7 feet (2.2 meters) each in diameter |
| Cameras | 2 color cameras (1 is a "fisheye") Image size: 1,024 pixels by 1,024 pixels |
| Science Instruments | 3 (a seismometer, heat probe, and a radio science experiment) |
Robotic Arm
The lander used the Instrument Deployment Arm (IDA) to place the instruments on the ground. The lander's sensitive instruments were able to obtain their best measurements in direct contact with the Martian surface.The grapple was at the end of the arm. The arm-mounted camera was between the elbow and wrist. The arm deployed the seismometer on the surface, from where it could sense marsquakes in action. It also placed on the surface the heat flow probe: a robotic “mole” that was designed to burrow about 16 feet (5 meters) into the ground.
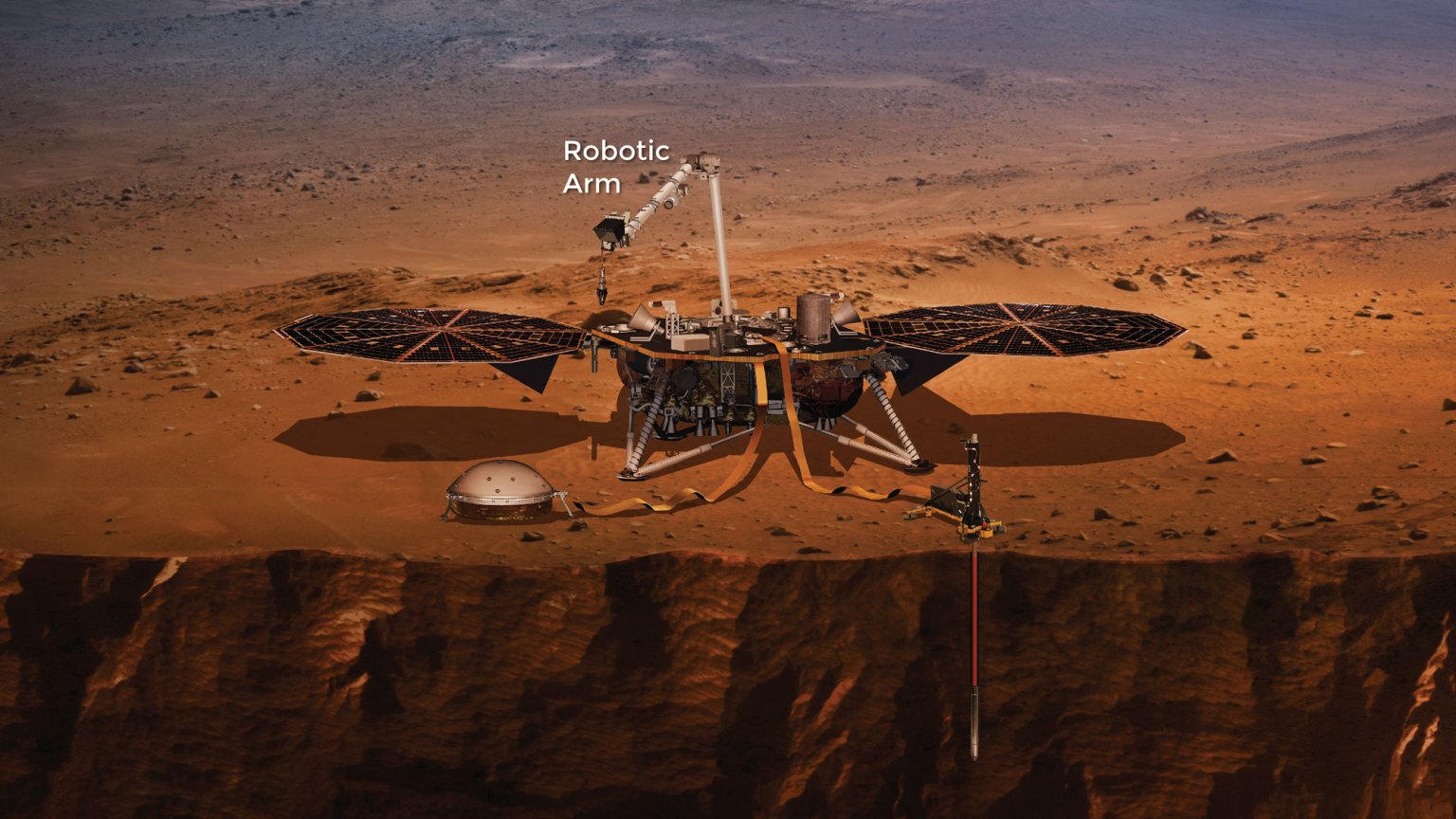
Due to the unexpected soil properties it encountered, and despite multiple attempts by the team to overcome the challenges, the mole was unable to reach the desired depth and take its measurements as designed. The mole's design was based on soil properties observed on Mars by previous Mars missions, but the properties encountered by the mole were much different. Knowledge gained from these challenges will be applied for the benefit of future Mars missions.
The robotic arm included a grapple for grasping each piece of hardware it lifted. The grapple's five mechanical fingers were able to close around a handle that resembled a ball on top of a stem. Each of the three items the arm lifted had one of these handles. The three are the Seismic Experiment for Interior Structure, the Heat Flow and Physical Properties Package, and the seismometer's Wind and Thermal Shield.
Robotic Arm Tech Specs
| Main Function | To place SEIS, the seismometer, and HP3, the Heat Flow and Physical Properties Package, on the surface of Mars |
| Length | 5 feet 9 inches (1.8 meters) |
| Degrees of Freedom | There were four (side-to-side and up-and-down at the shoulder, plus bending at the elbow and wrist joints) with four motors. |
| Tools on Arm | The arm had a grapple at the end of the arm. The arm-mounted camera was between the elbow and wrist. |
| Location | Attached to the lander deck |
Cameras
The InSight lander carried two complementary engineering cameras. One of the cameras was mounted on the arm; the other on the front of the lander.
Camera on Arm
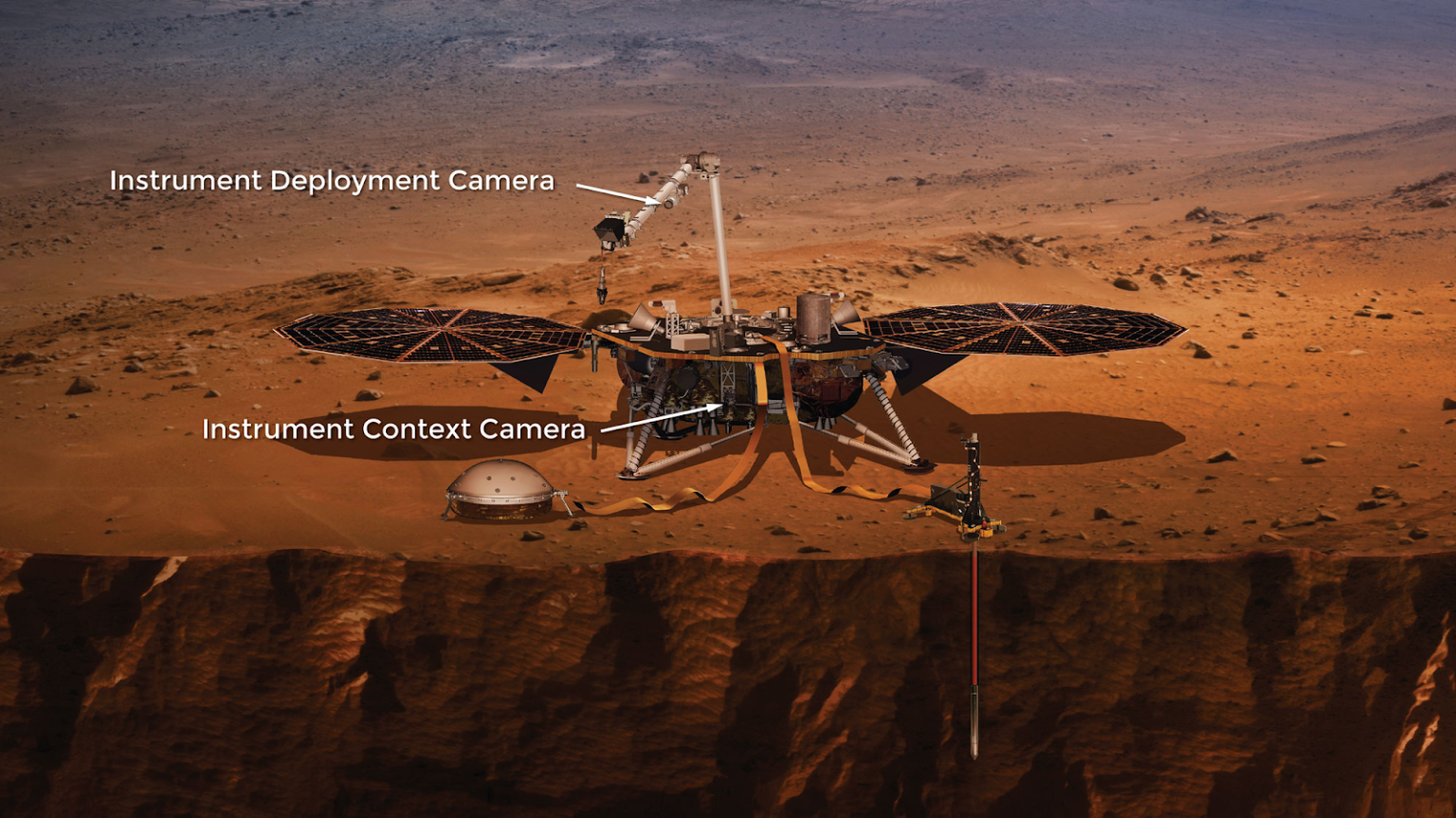
A camera on the arm was called the Instrument Deployment Camera (IDC). It was similar to the Navcam navigation cameras on board NASA's Opportunity and Curiosity rovers, with full color capability. It had a 45-degree field of view and could provide a panoramic view of the terrain surrounding the landing site. This camera imaged the workspace in detail to support the selection of the best spots to place down the instruments. The camera took color images of the instruments on the lander's deck and a 3D view of the region in front of the lander. Information received from the Navcam helped engineers and scientists guide the deployment of the seismometer and the heat flow probe. Scientists were able to point the camera in any direction, so it could take images to be combined into a 360-degree panorama of the lander's surroundings.
Camera on Lander Body
The lander's other camera, the Instrument Context Camera (ICC), was mounted just below the deck, on the edge of the lander facing the workspace, which was the area of ground within reach of the arm. The ICC had a "fisheye" field of view of 120 degrees. It provided wide-angle views of the entire workspace at once.
Like the Navcam, it was based on a similar camera on some of its predecessors, the Mars Exploration Rovers and Curiosity. It was mounted under the edge of the lander's deck and provided a complementary view of the instrument deployment area.
Both cameras had a square charge-coupled device (CCD) detector 1,024 pixels by 1,024 pixels.
Tech Specs
| Number of Cameras | 2 color cameras (1 is a "fisheye") |
| Main Function | To help the lander find the best location for its instruments within the landing site. |
| Location | One just below the rover deck, the other one on the robotic arm. |
| Image Size | 1,024 pixels by 1,024 pixels |