





















Mars 2020: Perseverance Rover
Rover Components
The Mars 2020 rover, Perseverance, is based on the Mars Science Laboratory's Curiosity rover configuration, with an added science and technology toolbox. An important difference is that Perseverance can sample and cache minerals.
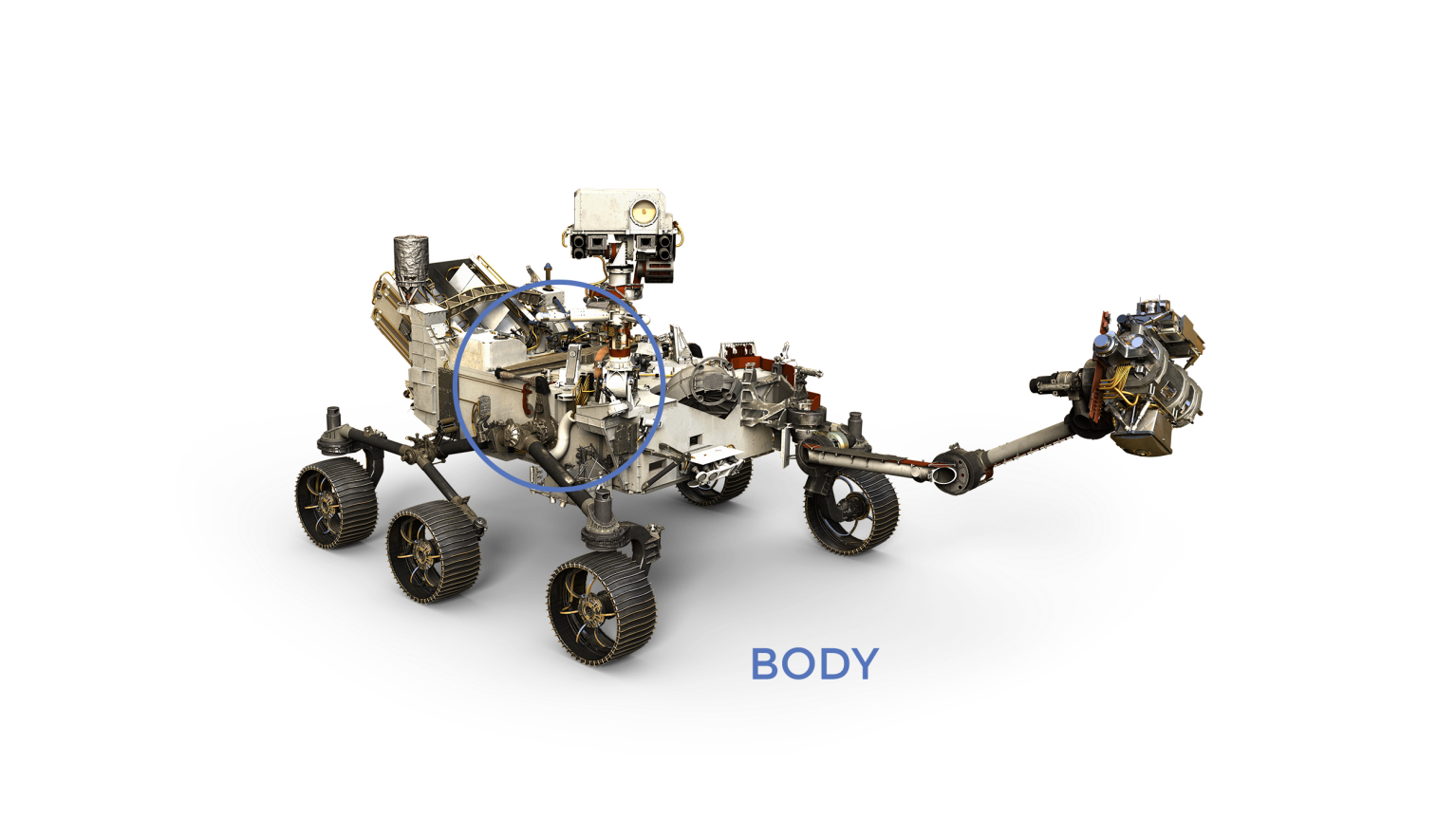
The Rover's "Body"
The Perseverance rover's body is called the warm electronics box, or "WEB" for short. Like a car body, the rover body is a strong, outer layer that protects the rover's computer and electronics (which are basically the equivalent of the rover's brains and heart). The body keeps the rover's vital organs protected and temperature-controlled.
Differences Between Perseverance and Curiosity
The large robotic arm on the front of the rover differs from Curiosity's:
Curiosity collected and studied samples collected onsite with its tools, using the rover's onboard laboratory. Perseverance collects rock cores for possible future advanced study by scientists back on Earth.
To accommodate the new functions and science tools for Perseverance, the rover has a larger "hand," or turret at the end of the robot arm. This turret has the coring drill, two science instruments, and a color camera for close-up surface inspection and "selfies" for engineering health checkups.
The workspace inside the rover body picks up, moves, and places drill bits and sample tubes within the Sample Caching System. New motors that drive these specialized movements were needed, so the Curiosity design was modified to handle the new Perseverance rover motor controller electronics.
Tech Specs
| Main job | Carry and protect the computer, electronic, and instrument systems |
| Length | 10 feet (3 meters) |
| Width | 9 feet (2.7 meters) |
| Height | 7 feet (2.2 meters) |
| Weight/mass | 2,260 pounds / 1,025 kilograms |
| Structure | Bottom and sides are the chassis frame; top is the rover equipment deck (its "back"); bottom is the belly pan for the new Sampling and Caching interior workspace, the belly pan in that front end (about the first 1 1/2 feet from front end) was dropped soon after the rover landed, to expose it to the Martian atmosphere and make room for sample handling. |
Wheels and Legs
New Wheels for Perseverance
Engineers redesigned the Mars 2020 Perseverance rover's wheels to be more robust, due to wear and tear the Curiosity rover wheels endured while driving over sharp, pointy rocks. Perseverance's wheels are narrower, with a bigger diameter and thicker aluminum. Perseverance has six wheels, each with its own motor. The two front and two rear wheels also have individual steering motors, to turn in place a full 360 degrees. The four-wheel steering also lets the rover swerve and curve, making arcing turns.

Tech Specs - Wheels
| Materials | Made of aluminum, with cleats for traction and curved titanium spokes for springy support. |
| Size | 20.7 inches (52.5 centimeters) in diameter |
| Other | One full turn of the wheels with no slippage drives the rover 65 inches (1.65 meters). |
How the Wheels Move
Like NASA's previous rovers, Perseverance uses a "rocker-bogie" suspension system . The suspension system connects the wheels to the rover and controls how the rover interacts with the Martian terrain.
Perseverance is designed to withstand a 45-degree tilt in any direction without tipping over. For added protection, rover drivers avoid terrains that would tilt the rover more than 30 degrees.
The suspension system has three main components:
| Differential: | A pivot in the top deck's center connects it to the left and right rockers and the rover body. |
| Rocker: | One on the left, one on the right. Connecting the front wheel to the differential and bogie in the rear. |
| Bogie: | Connects middle and rear wheels to the rocker. |
The rover's rocker-bogie suspension enables the rover to drive over obstacles (such as rocks) or through depressions as large as the rover's wheel (20.7 inches, or 52.5 centimeters). Each wheel has an aggressive tread with 48 grousers (or cleats), machined into its surface. The grousers give excellent traction when driving in soft sand and hard rocks.
Rover Speed
By Martian vehicle standards, Perseverance is a standout. Its top speed on flat, hard ground is just under 0.1 mph (152 meters per hour). On Mars, it's about the journey and destinations--not the speed. The energy-efficient slow pace consumes less than 200 watts, compared to nearly 150,000 watts for a 200-horsepower car.
Tech Specs - Legs
| Materials | Titanium tubing formed with the same process in high-end mountain bike frames. |
| Others | Enable the rover to drive over knee-high rocks up to 15.75 inches (40 centimeters). |
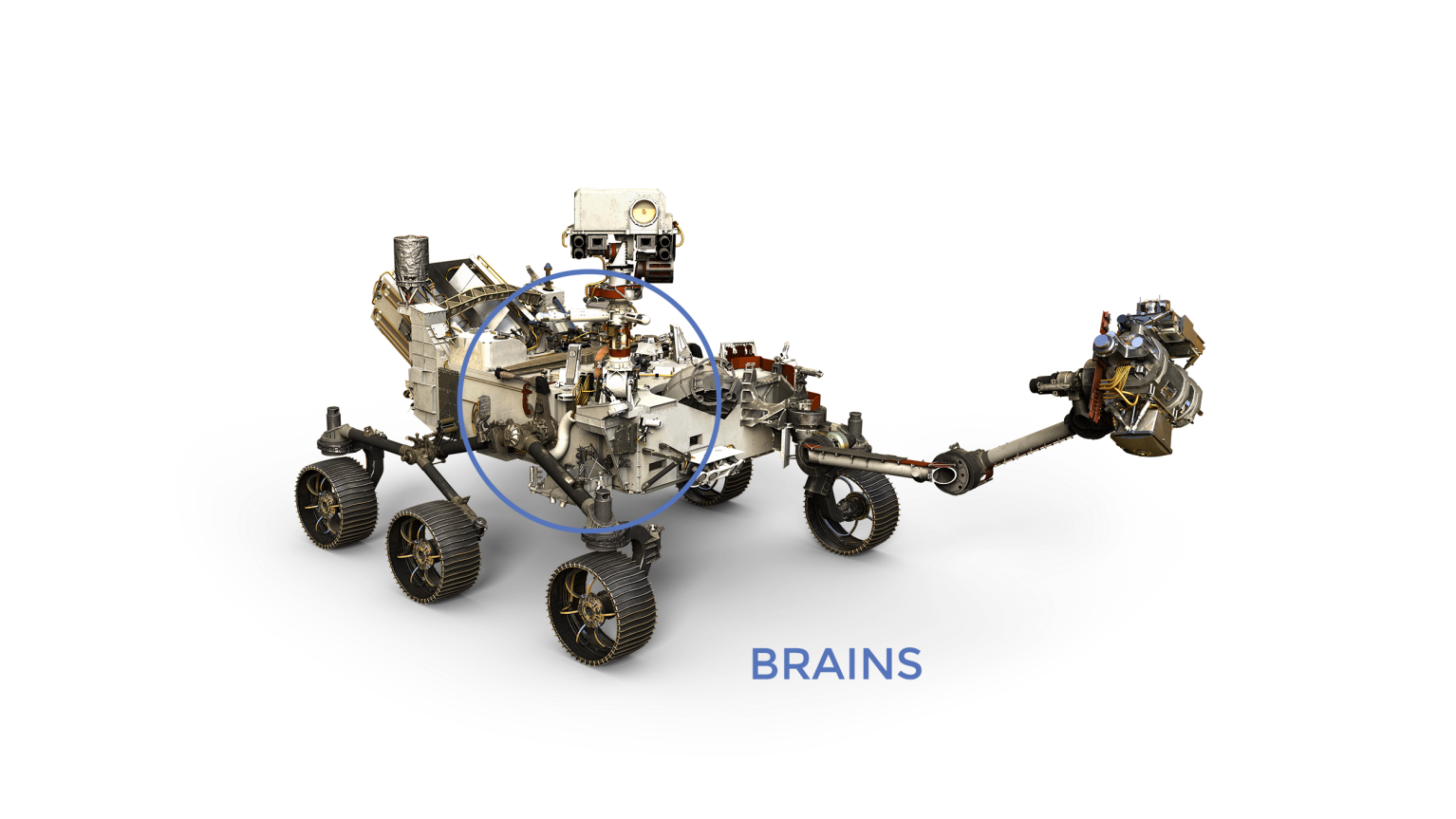
Brains
The rover's brains - its computer - are in its boxy body. The computer module, the Rover Compute Element (RCE), has two identical RCEs so there is always a spare "brain." The computer memory tolerates extreme radiation in space and on Mars. The RCE interfaces with the rover's engineering functions over two networks that follow an aerospace industry standard for the high-reliability airline and spacecraft requirements. The RCEs directly interface with the rover instruments for command and science data exchange.
Tech Specs - Brains
| Processor | Radiation-hardened central processor with PowerPC 750 Architecture: a BAE RAD 750 Operates at up to 200 megahertz speed, 10 times the speed in Mars rovers Spirit and Opportunity's computers |
| Memory | 2 gigabytes of flash memory 256 megabytes of dynamic random access memory 256 kilobytes of electrically erasable programmable read-only memory |
"Nerves" for balance and position
An Inertial Measurement Unit (IMU) provides 3-axis information on its position, sothe rover can make precise vertical, horizontal, and side-to-side (yaw) movements. For navigation, the device supports safe traverses and estimates the rover's tilt.
Monitoring its "health"
The computers register temperature and power levels, and other features that keep the rover "alive." This main control loop constantly checks to ensure that the rover can communicate and keep from getting too hot or cold. It checks and adjusts temperature controls, particularly in the rover body, then records power generation and storage data to decide which new activities to start or finish. It then schedules and prepares for communication sessions with Earth or local Mars orbiters.
Using its "computer brains" for exchanging information with the team
The flight team on Earth commands the rover to take pictures, drive, and operate the instruments. Perseverance generates and stores constant engineering, housekeeping, analysis telemetry, and event reports, and transmits the data when the flight team asks for it. One of the two "computer brains is normally asleep, but can be awakened in case of problems.
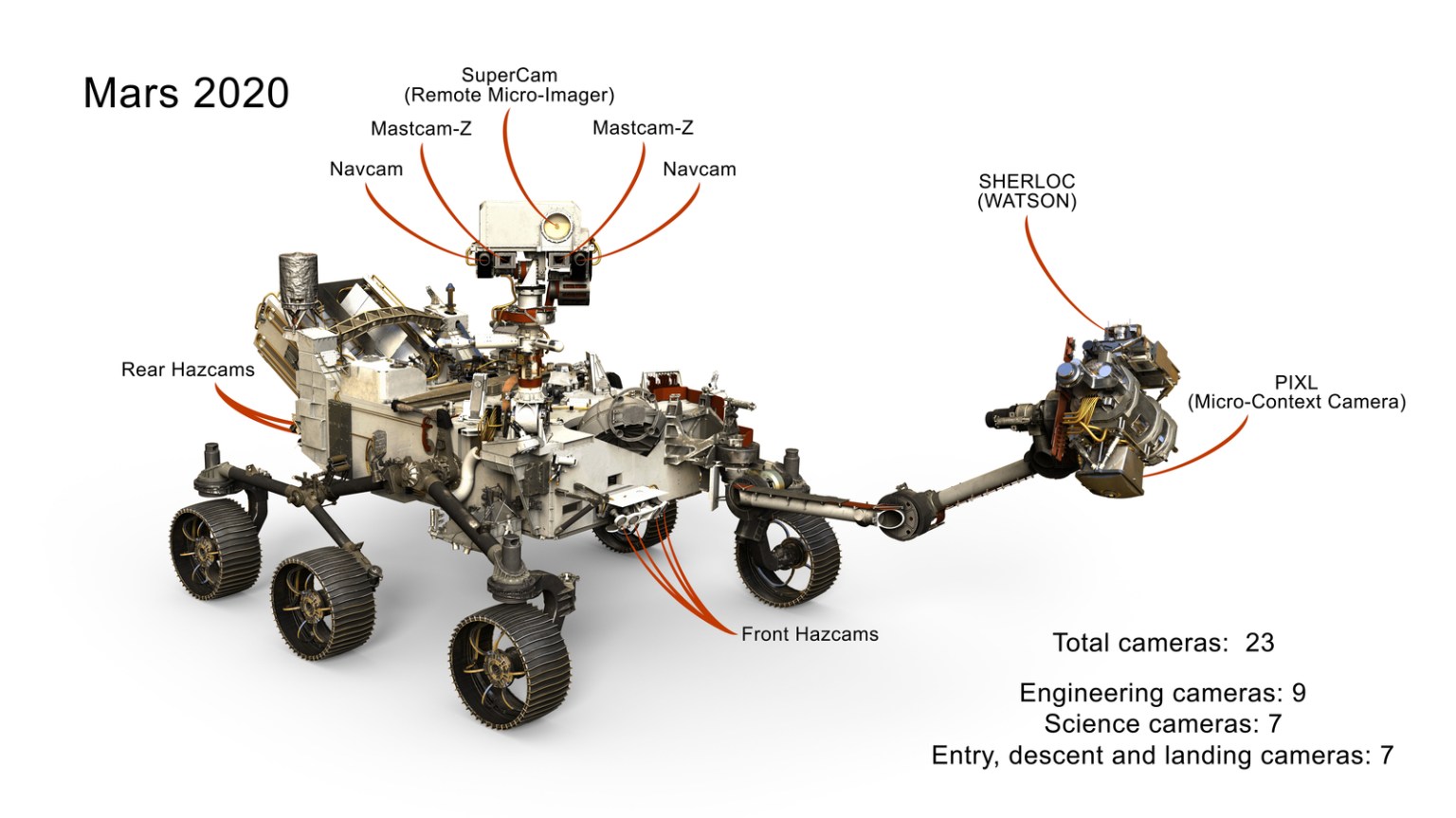
Neck and Head
A mast for the cameras to give the rover a human-scale view.
Eyes and Ears
Robots have replicated much of the human sensory experience on Mars. Cameras have given us sight, robotic hands, arms and feet have supplied touch, and chemical and mineral sensors have let us taste and smell on Mars.
Engineering Cameras
Several cameras for engineering and science tasks serve as eyes for driving, while others make science observations and help collect samples. robotic hands, arms and feet supply.
Entry, Descent, and Landing Cameras
Several cameras recorded stunning full-color views during the Perseverance entry, descent, and landing, including videos that provided invaluable data to help the team address such questions as how precisely the rover touched down in the landing area, how the landing system moved during landing, how much sand and rock the retro rockets blew into the Martian atmosphere, and how the landing system moves as it descends. These new eyes and ears of Perseverance were assembled from easily available commercial hardware. The cameras and microphone were an optional add-on.
The Mars 2020 entry, descent, and landing camera suite included:
-
01
Parachute "up look" cameras
Mounted on the backshell, looking upward at parachute deployment and inflation. Two of three cameras successfully recorded the parachute.
-
02
Descent-stage "down look" camera
Mounted on the descent stage, looking downward as the rover was lowered during the skycrane maneuver.
-
03
Rover "up look" camera
Mounted on the rover deck, looking upward at the descent stage during the skycrane maneuver and descent stage separation.
-
04
Rover "down look" camera
Mounted beneath the rover, looking downward at the surface.
Lander Vision System Camera
Critical to a safe touchdown, this camera took images needed for Terrain-Relative Navigation. During descent, while the spacecraft dangled beneath the parachute, the wide-angle Lander Vision System Camera looked downward, busily taking images of the rapidly approaching surface. A computer on the rover quickly analyzed the images and compared them to an onboard map to determine the rover’s position relative to the ground. This helped Perseverance autonomously pick the safest touchdown site within its landing area. The camera's image size is 1024x1024 pixels.
Enhanced Engineering Cameras for Driving
These cameras help human operators on Earth drive the rover more precisely, and better target the movements of the arm, drill, and other tools that get close to their targets. A much wider field-of-view allows for a much better view of the rover.
This is important for checking the health of rover parts and measuring changes in dust and sand quantities that may accumulate on rover surfaces. The cameras can take pictures while the rover is moving. These cameras share the same camera body, but use different lenses for each task.
Hazard Avoidance Cameras (HazCams)
Perseverance carries six newly developed Hazard Detection Cameras (HazCams): four in front and two on the rear. HazCams detect hazards to the front and back pathways of the rover, such as large rocks, trenches, and sand dunes. The front HazCams help engineers see where to move the robotic arm to take measurements, photos, and collect samples. When driving, the rover stops frequently to take new stereo images of the path ahead to evaluate potential hazards. The 3D views allow the rover to make its own decisions about where to drive without consulting on every move with the rover team on Earth.
Tech Specs
| Main job | Aid in autonomous navigation |
| Location | Mounted at the front and rear of the rover's body, pointing down toward the ground |
Navigation Cameras (Navcams)
Two color stereo Navigation Cameras (Navcams), help engineers navigate Perseverance safely, particularly when the rover navigates autonomously.
Located high on the rover's mast, these cameras can see an object as small as a golf ball from 82 feet (25 meters) away. Before Perseverance "drives blind,” the cameras help ensure a safe path. Blind-drive mode occurs when engineers command the rover to drive a certain distance in a certain direction, and the rover's computer "brains" calculate distance from wheel rotations without looking or checking for wheel slippage.
Tech Specs
| Main job | Aid in autonomous navigation |
| Location | Mounted high on the rover's mast; left and right "eyes" are about 16.5 inches (42 centimeters) apart |
CacheCam: New Camera to Record Sample Collection
The "CacheCam" single camera looks down at the top of the sample cache. It takes pictures of sampled materials and the sample tubes as they are being prepared for sealing and caching. This helps scientists “watch over” and keep a record of the entire process.
Tech Specs
| Main job | To see down into the top of a sample tube after the sample is gathered; to take microscopic pictures of the top of the sample material before the tube is sealed |
| Location | Inside the rover underbelly, at the top of the sample cache |
Ears
Hearing is the last of the five senses we have yet to exercise on the Red Planet. Engineers have equipped Perseverance to be a good listener with two microphones, making it possible for it to not only touch and taste, but finally hear the sounds of Mars!
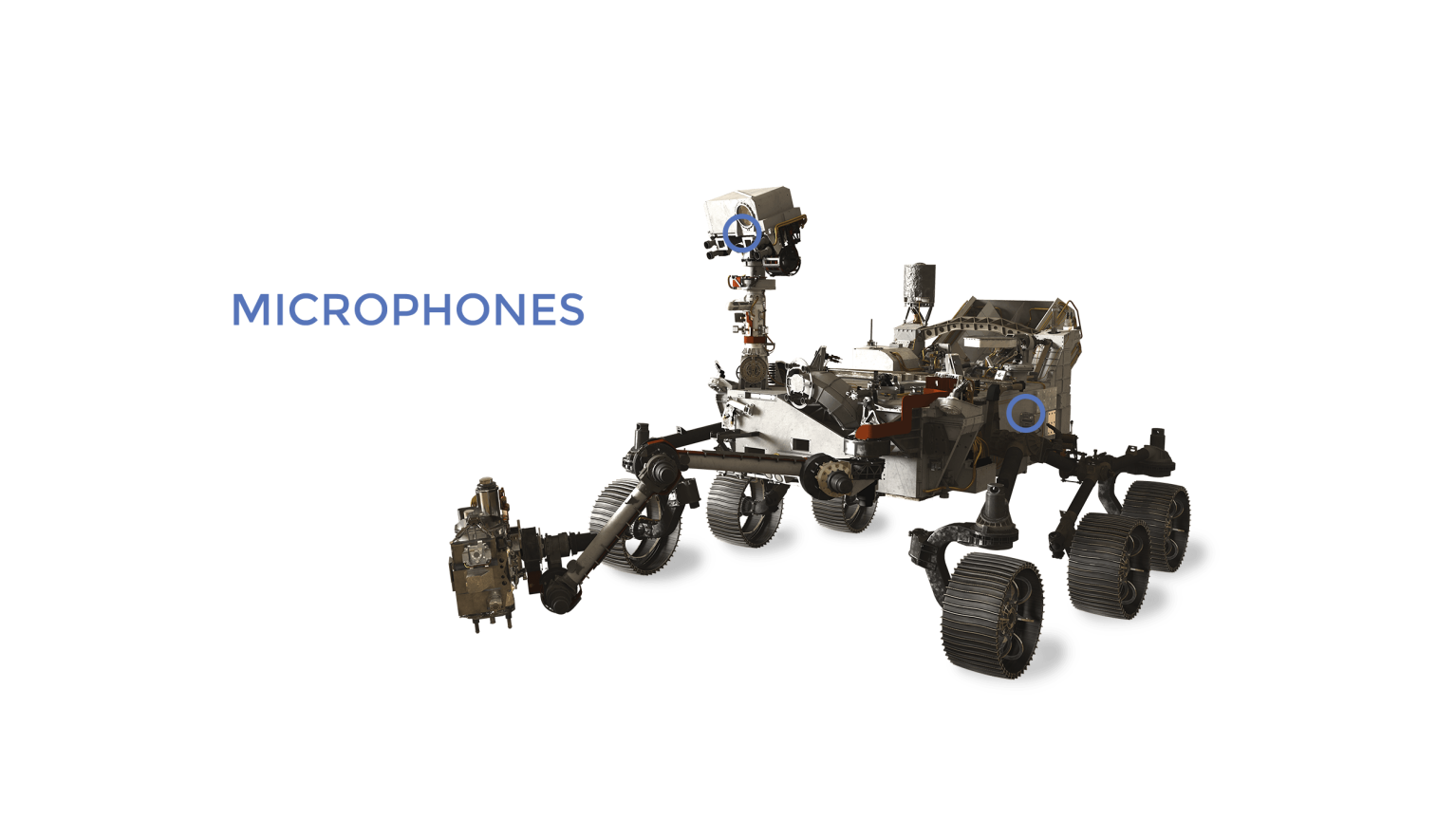
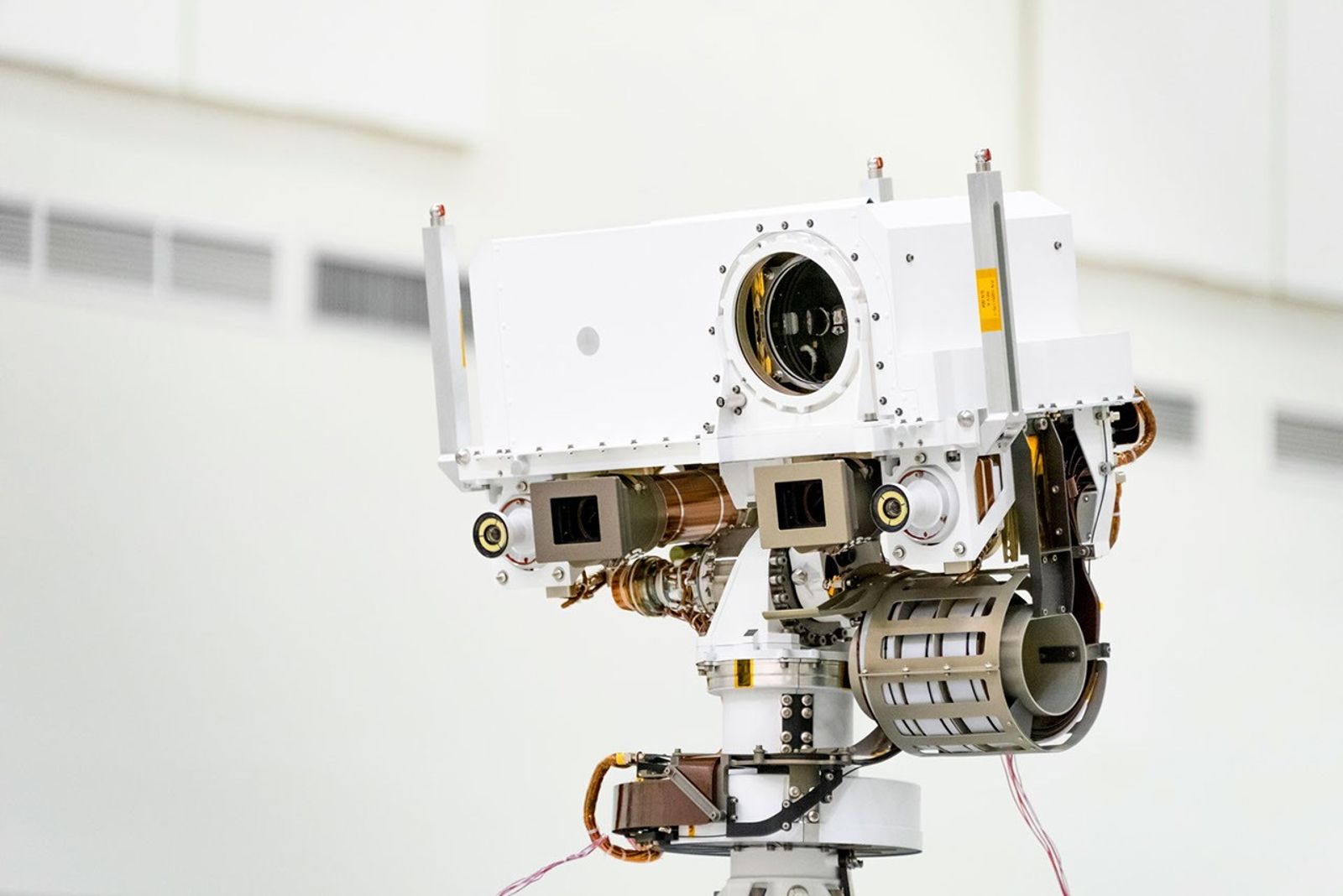
Microphone on SuperCam
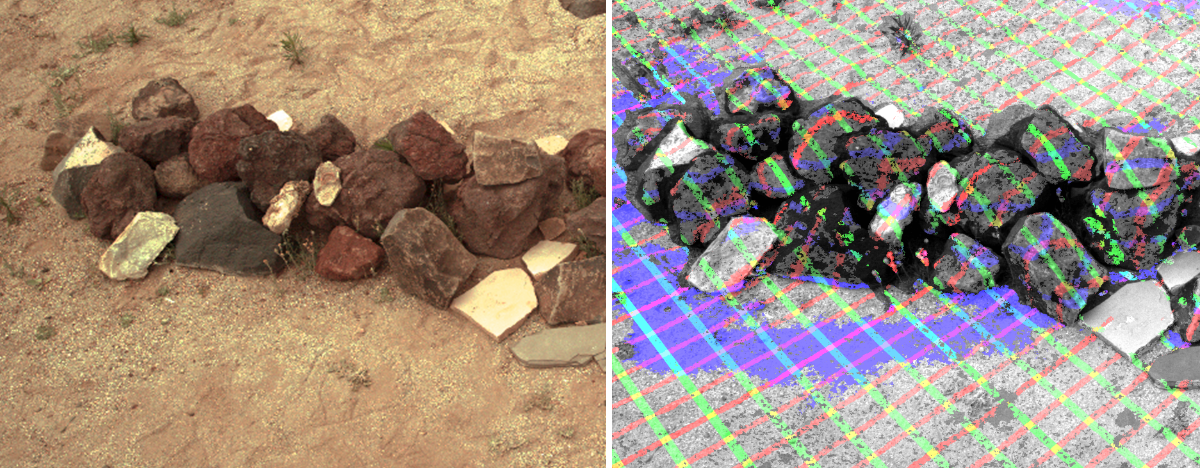
SuperCam identifies minerals and rock compositions, and it seeks organic compounds that could be related to past life on Mars. It has a laser that can zap and study areas on a rock as small as the period at the end of this sentence. All from about 20 feet, or 7 meters away. Its camera and spectrometers then examine the rock's chemistry. The microphone on SuperCam gives scientists another "sense" with which to probe the rock targets they are studying.
| Main job | To help study Mars rocks |
| Location | On a short 15 mm boom on the head of the rover’s long mast |
| Listening when | The SuperCam instrument is on, for a few milliseconds at a time. Or to listen to wind and for rover sounds for about 3.5 minutes at a time. |
| Weight | 30 grams, or about 1 ounce |
| What it can hear | The staccato pop caused when the laser studies rock, wind, and rover noises |
Hearing the Sounds of a Laser Firing
When SuperCam fires a laser at a rock, a small amount of the rock vaporizes into a hot gas called "plasma", and heat and vibration creates a shockwave that makes a popping sound. SuperCam’s camera and spectrometer can "read" the hot gas to reveal the chemical makeup of the vaporized rock. At the same time, the microphone hears the staccato "pop" as the laser strikes rock several feet away from Perseverance.
The kind of "pop" it makes tells scientists about the mass and makeup of the rock. The intensity of the sound reveals the relative hardness of the rocks, which can tell us more about their geological context. For example, the hardness of the rock can help tell us whether the rock was formed in a lake or from wind-driven material, or how much pressure was involved in its formation. All without ever driving up and touching it.
SuperCam can listen for about 3.5 minutes at a time while performing science observations. This gives the rover the chance to hear the sounds of Mars, such as the high-pitched sound of sand grains over the surface, the wind whistling around the rover mast, and low-pitched howls of dust devils passing by. The microphone also records sounds of Perseverance using its arm, coring rocks, and the wheels crunching against the surface. The rover may hear the other instruments, internal mechanisms, and hear when we drop off the sample tubes. In some cases, sound can help the team diagnose the health of the rover's internal mechanisms or instruments.
Sounds of Mars
Grab your headset, turn up the volume and listen for the subtle differences between the sounds on Earth versus how they would sound on the Red Planet.
Listen to sounds on MarsMicrophone to Record the Rover's Landing
The Perseverance rover’s Entry Descent and Landing (EDL) system is similar to Mars Science Laboratory/Curiosity, but it carries a microphone with which to record the sounds of descent. This microphone records audio as the Perseverance rover descends to the surface. We may hear the friction of the atmosphere, the winds, and the sounds of dust displaced as the rover lands.
| Main job | To record the sounds of landing |
| Location | The EDL mic's "brains" are inside the body of the rover; its "ears” are on side of the rover body |
| Operating | As the rover descends on Mars |
| Recording | The sounds of descent, friction from the atmosphere, dust blown up by the thrusters as the rover descends |
Robotic Arm
The 7-foot-long (2.1 meters) robotic arm can move a lot like your arm. Its shoulder, elbow. and wrist "joints" offer maximum flexibility. Using the arm, the rover works as a human geologist: holding and using science tools with its "hand," or turret. The "hand tools" extract cores from rocks, take microscopic images. and analyze the elemental and mineral composition of Martian rocks and soil.
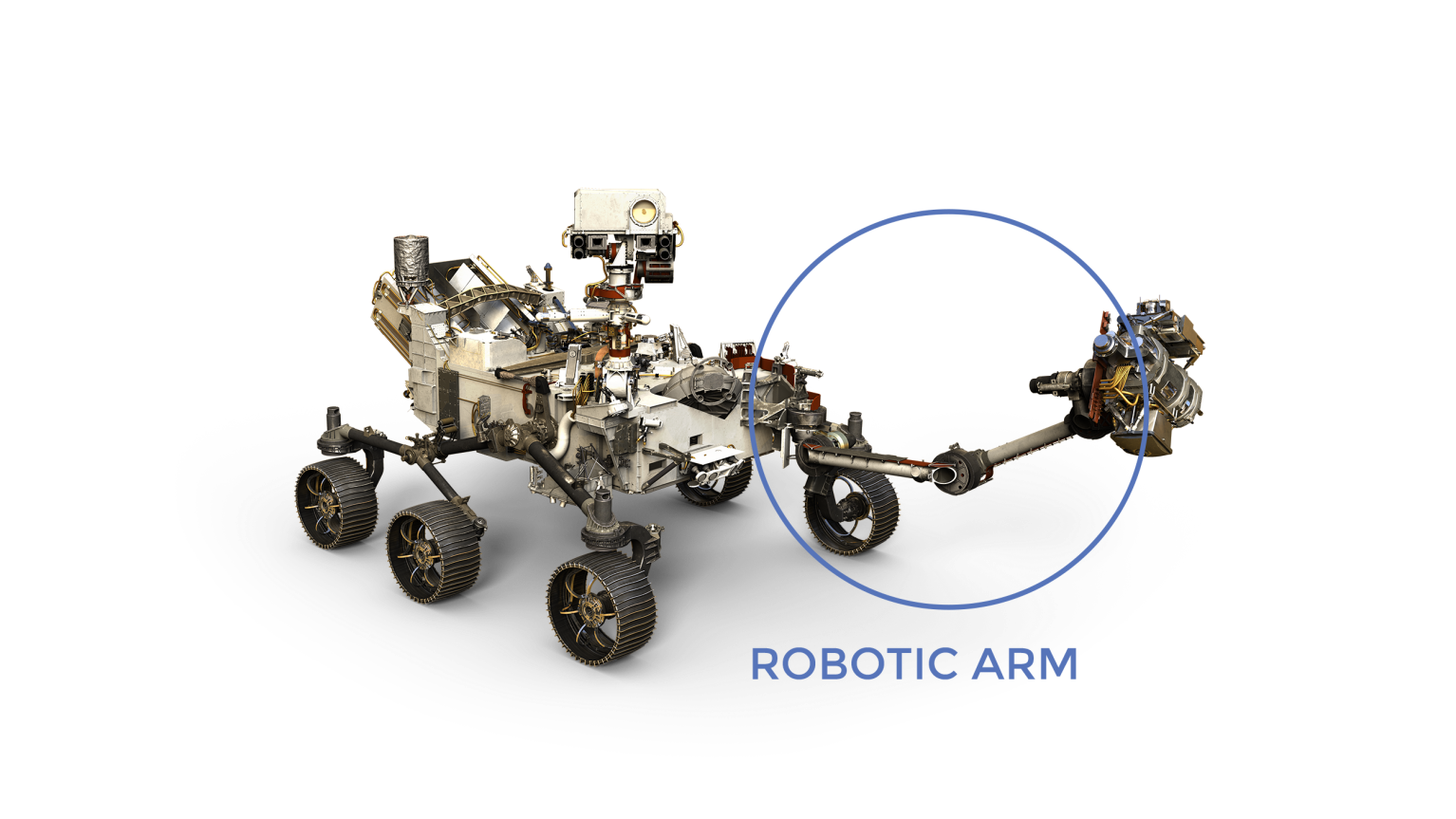
Tech Specs - Robotic Arm
| Main function | Assist in Mars surface investigation and sample collection |
| Length | 7 feet (2.1 meters) |
| Degrees of freedom | There are five degrees of freedom, made possible by tiny rotary actuator motors. The five degrees are the shoulder azimuth joint, shoulder elevation joint, elbow joint, wrist joint, and turret joint. |
| “Hand” turret | The turret at the end of the arm carries scientific cameras, and mineral and chemical analyzers to study the past habitability of Mars, and choose the most scientifically valuable sample to cache. |
| Names of tools on the turret | SHERLOC and WATSON, PIXL, GDRT (Gaseous Dust Removal Tool), Ground Contact Sensor, Drill |
| Drill | The rotary percussive drill extracts rock core samples from the Mars surface. |
| Drill bits | A suite of interchangeable bits: coring bits, regolith bits and an abrader. |
| Diameter of drilled holes | 1 inch (27 millimeters) |
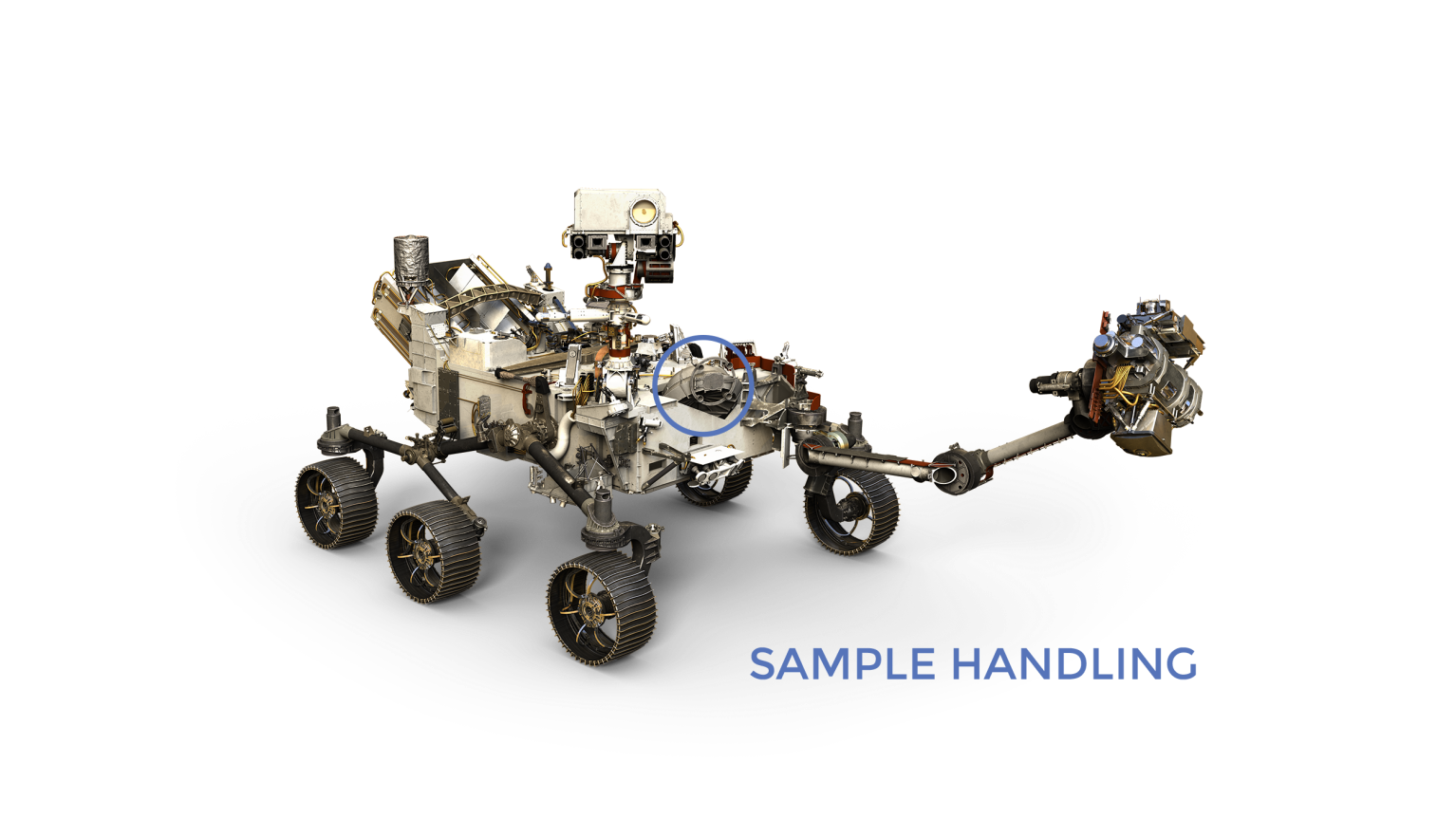
Sample Handling
The Perseverance rover is the first mission to demonstrate gathering samples from Martian rocks and soil using its drill. The rover stores the sample cores in tubes on the Martian surface. This sample caching process could potentially pave the way for future missions to collect the samples and return them to Earth for intensive laboratory analysis.
The three major steps in sample handling are:
Step 1: Collecting the Samples
Samples are sealed in tubes and left in a well-identified spot, or spots, place on the Martian surface. Detailed maps will be provided for any future mission that might go to Mars and pick up these samples for study by scientists on Earth.

Step 2: Sample Sealing and Storing Onboard
After a sample is collected, the sample tube is transferred back to the rover's belly, handed off to the small interior robotic arm and moved to inspection and sealing stations. Once the tube is hermetically sealed, nothing can enter or leave it. The tubes are stored in the rover belly until the team decides on when and where to drop off the samples on the surface.

Sampling Equipment in the Rover Belly
The rover belly houses all the equipment and supplies needed to collect samples. It contains a rotating drill carousel with different kinds of drill bits. Next to that are 43 sample tubes waiting to be filled.
While the rover’s big arm reaches out and drills rock, the belly hosts a small robotic arm "lab assistant." The small arm picks up and moves new sample tubes to the drill, and transfers filled sample containers into a space for sealing and storing.

Witness Tubes
Perseverance must meet extraordinary cleanliness requirements to avoid contaminating Martian samples with terrestrial contaminants that may have inadvertently been brought from Earth. Strict rules limit the amount of inorganic, organic, and biological materials from Earth in the rover and its sample handling system.
Perseverance carries five "witness tubes'' along with sample collection tubes. The witness tubes are like sample tubes except they are preloaded with various materials that can capture molecular and particulate contaminants, such as:
- Gasses that may be released, or "outgassed," from materials on the rover;
- Chemical remnants from the firing of the landing propulsion system;
- Any other Earthly organic or inorganic material that may have arrived on Mars with the rover.
In the future, if the Perseverance samples are returned to Earth for analysis, the witness tubes would show whether Earth contaminants were present during sample collection. This would help scientists tell which materials sampled may actually be of Earth origin.
Step 3: Depositing the Samples on the Surface
Samples are deposited on the Mars surface at a sample cache depot.The depot location or locations must be well-documented by local landmarks and precise coordinates from orbital measurements. The Mars samples remain at the depot, available for potential pickup and transport Earth.
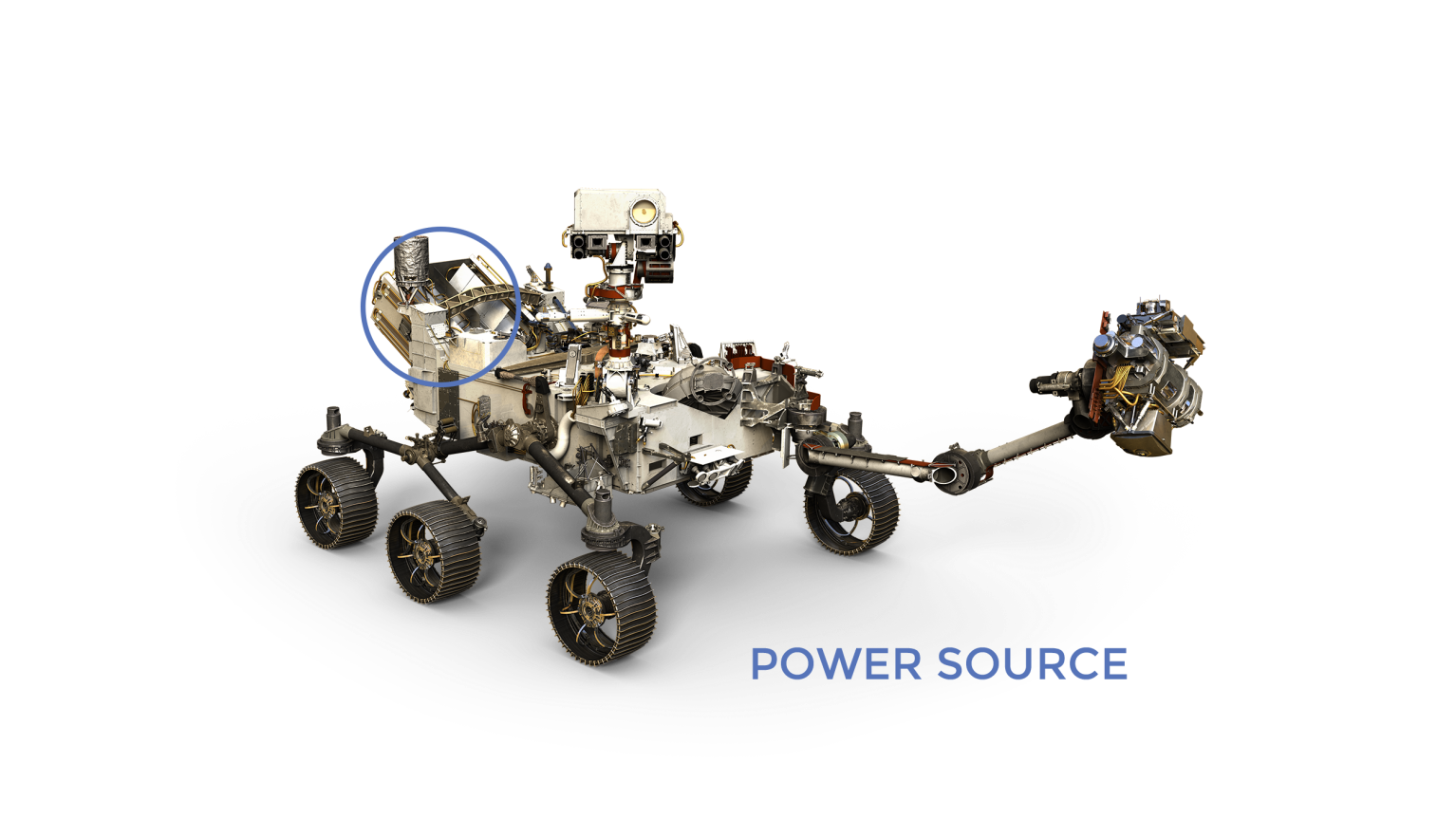
Power Source
For electrical power, Perseverance carries a radioisotope power system (RPS). This system produces a dependable electricity flow using the heat of plutonium-238's radioactive decay as its "fuel."
The power source, called a Multi-Mission Radioisotope Thermoelectric Generator (MMRTG), has a 14-year operational lifetime. The MMRTG converts heat from the natural radioactive decay of plutonium into electricity to charge the rover's two primary batteries and keep the rover's tools and systems at their correct operating temperatures.
Tech Specs - Power Source
| Main job | Provide electricity to the rover |
| Location | Aft end of the rover |
| Size | 25 inches (64 centimeters) in diameter by 26 inches (66 centimeters) long |
| Weight | About 99 pounds (45 kilograms) |
| Power system | Uses 10.6 pounds (4.8 kilograms) of plutonium dioxide as the source of the steady supply of heat |
| Electrical power produced | About 110 watts at launch, declining a few percent per year |
| Batteries | Two lithium-ion rechargeable batteries to meet peak demands of rover activities when the demand temporarily exceeds the MMRTG's steady electrical output levels. |
| Reliability | The 14-year operational lifetime of an MMRTG provides significant reserve for Mars 2020 prime mission duration of 1.5 Mars years (three Earth years) and gives the rover greater mobility over a large range of latitudes and altitudes. |
| Safety | The fuel inside each General Purpose Heat Source module is surrounded by several layers of protective materials, including the type of tough material used in the nose cones of missiles designed to survive fiery conditions during re-entry into Earth’s atmosphere. In addition, the radioisotope fuel is manufactured in a ceramic form (similar to the material in a coffee mug) that resists being broken into fine pieces, reducing the chance that hazardous material could become airborne or ingested. |
Communications
The Perseverance rover has three antennas that serve as its "voice" and its "ears." They are located on the rover equipment deck. Having multiple antennas provides operational flexibility and back-up options in case they are needed.
Ultra-High Frequency Antenna
| Main job | Transmitting Data to Earth through Mars orbiters |
| Radio frequency | Ultra-High Frequency (UHF) band (about 400 megahertz) |
| Transmission rates | Up to 2 megabits per second on the rover-to-orbiter relay link. |
X-band High-Gain Antenna
| Main job | Transmitting data directly to and from Earth |
| Radio frequency | X band (7 to 8 gigahertz) |
| Location | Mounted mid-aft portside of Mars 2020 deck ("back") |
| Size | Hexagonally shaped, 1 foot (0.3 meters) in diameter |
| Transmission/ reception rates | 160/500 bits per second or faster to/from the Deep Space Network's 112-foot-diameter (34-meter-diameter) antennas or at 800/3000 bits per second or faster to/from the Deep Space Network's 230-foot-diameter (70 meter-diameter) |
| Provided by | Spain |
X-band Low-Gain Antenna
| Main job | Receiving Data |
| Radio frequency | X band (7 to 8 gigahertz) |
| Reception rates | Approximately 10 bits per second or faster from the Deep Space Network's 112-foot-diameter (34-meter-diameter) antennas or approximately 30 bits per second or faster from the Deep Space Network's 230-foot-diameter (70-meter-diameter) antenna |


