


![Request for Information – Potential [Placeholder for Prize]](https://assets.science.nasa.gov/dynamicimage/assets/science/psd/solar/2023/09/s/solarsystem_0.jpg?w=1024)







PROJECT
Terrain Relative Navigation (TRN)
SNAPSHOT
To land accurately and avoid hazardous terrain, NASA has developed an autonomous, vision-based system for landmark recognition, spacecraft position estimation, and spacecraft retargeting, which will be used on Mars 2020 and potentially other future missions.

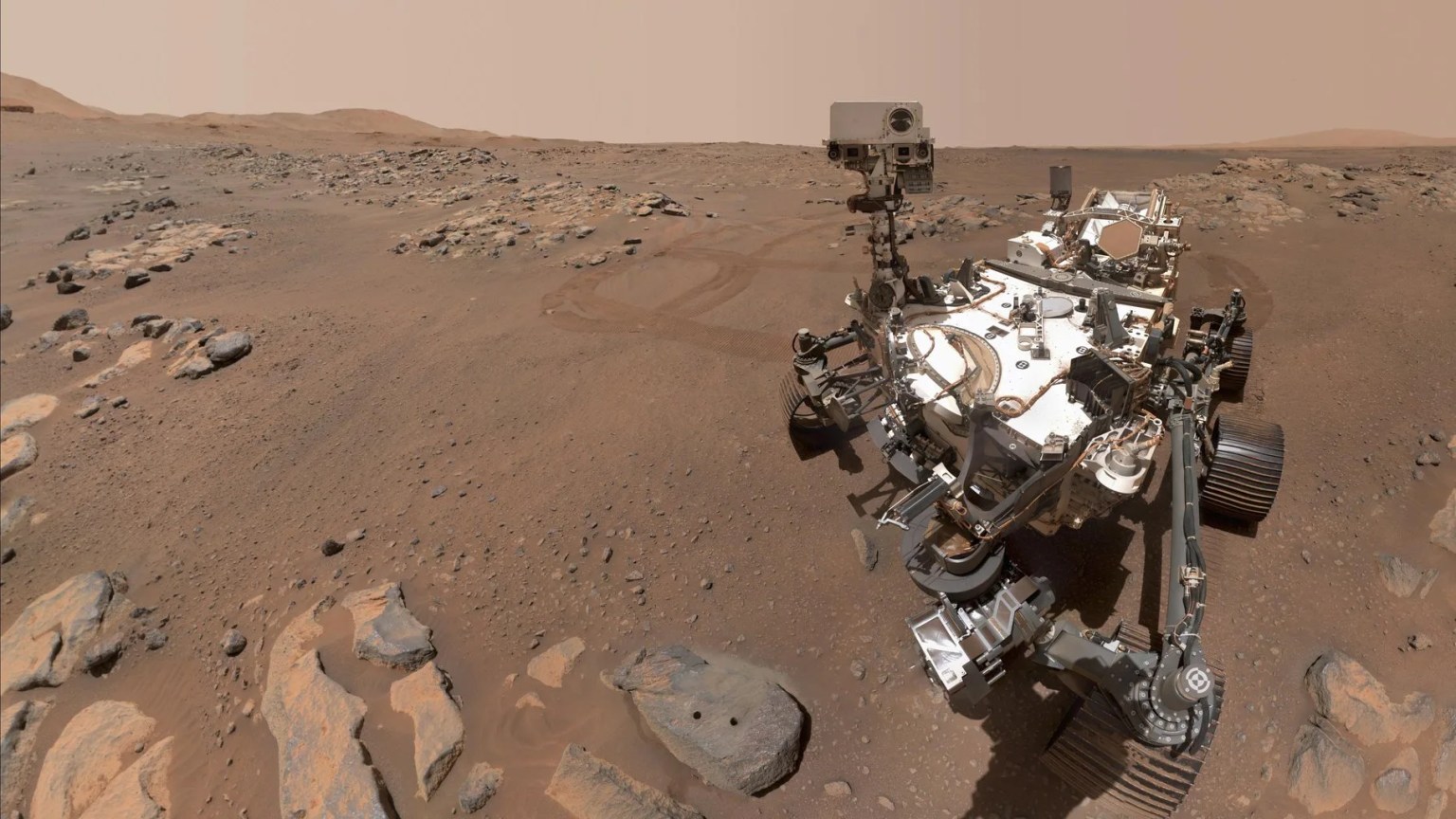
When the Mars 2020 spacecraft deposits the Perseverance rover on Mars on February 18, a newly developed system will enable it to navigate hazardous terrain and land the rover safely by quickly and autonomously sensing its location relative to the Martian surface and modifying its trajectory as needed during descent.
Navigation systems like the Global Positioning System (GPS) are only available on Earth, so spacecraft exploring other bodies in space need to use different methods to determine where they are. During the Apollo moon landings, astronauts sighted landmarks for landing and looked out the window during the final descent to avoid craters and boulder fields and land safely. Since then, technology has advanced to the point where sensors, algorithms, and onboard computing can replace and even surpass human capability to navigate and enable safe landings in space. NASA’s Mars 2020 spacecraft will use such a system to land the Perseverance rover at the Jezero Crater later this month.
By matching onboard sensor data to a map of the landing area, Terrain Relative Navigation (TRN) provides a map-relative position fix that can be used to accurately target specific landing points on the surface and avoid hazards. Almost all future NASA science missions that land on bodies in outer space can benefit from this capability to navigate safely and precisely. For example, both Jupiter’s moon Europa and Saturn’s moon Enceladus have small fissures where material from subsurface oceans could be present and which would be scientifically valuable to explore. Comets and asteroids have rough terrain that will require careful targeting during landings to safely acquire a sample. The Moon’s polar regions are hard to target, but are desirable landing sites because they provide permanently lit, thermally stable locations that can provide near-constant solar energy. TRN will allow the Mars 2020 mission to mitigate landing hazards present in the regions with the greatest geological diversity and will facilitate collection of valuable scientific samples. The follow-on Mars Sample Return Lander mission will also require TRN to avoid the same hazards, land near the cache of Mars 2020 samples, and pick them up for return to Earth.
To reduce development risk, the Mars 2020 TRN effort relied heavily on the design of the Entry, Descent, and Landing (EDL) system that was successfully employed by Mars Science Laboratory (MSL) mission to land the Curiosity rover on Mars in 2012. Like MSL, the Mars 2020 spacecraft will descend toward the Mars surface on a parachute and then, during the final seconds prior to landing, will lower the upright Perseverance rover on a tether to the surface, much like a sky crane.

This system uses ground-based navigation from Earth to determine the position of the spacecraft just before atmospheric entry. Given the distance between Earth and Mars, ground-based positioning is surprisingly accurate, but at 3km above the surface, the position error is too large to enable precise navigation. To reduce this position error down to 40m relative to a map of the landing site, Mars 2020 added a new technology called the Lander Vision System (LVS) to the EDL system. Using the position provided by LVS, the onboard guidance system selects a landing point that is reachable given the fuel onboard and that also avoids hazards identified a priori in the map.

This new technology will enable Mars 2020 to land at the Jezero Crater, a site that is very desirable scientifically for the Mars 2020 mission, but was previously considered too hazardous for landing. The LVS technology was developed over several years, starting with initial proof of concept algorithms and culminating with a closed-loop pinpoint landing demonstration on a terrestrial vertical takeoff and landing rocket. In addition to NASA Science Mission Directorate funding, NASA’s Space Technology Mission Directorate contributed significant funding to TRN technology development and facilitated helicopter and suborbital rocket tests that helped qualify the system for Mars 2020.
After noting that the technology was low risk and there was clear scientific benefit, the Mars 2020 project decided to incorporate the technology in 2016 and since then, the TRN team has been building the flight system based on the LVS technology. This effort required the development of flight software for landmark matching, state estimation, and safe site selection; a high-performance compute element for vision processing; a high frame-rate camera; and high-precision mapping techniques.
Toward the end of development, the team conducted an extensive validation campaign, which included a helicopter field test over terrain similar to that on Mars, system tests of the flight hardware, and high-fidelity Monte Carlo simulations that modeled landings thousands of times in all possible landing conditions. Once the TRN system was complete, the hardware and software were installed on the flight vehicle, which is currently cruising to Mars. The TRN system has passed all onboard checks and is ready to facilitate a safe landing for the Mars 2020 spacecraft and the Perseverance rover on the planet surface on February 18, 2021.


This research was carried out at the Jet Propulsion Laboratory, California Institute of Technology, under a contract with the National Aeronautics and Space Administration (80NM0018D0004).
PROJECT LEAD
Dr. Andrew E. Johnson, NASA Jet Propulsion Laboratory, California Institute of Technology
SPONSORING ORGANIZATIONS
Planetary Science Division‘s Mars 2020 Project and the Space Technology Mission Directorate (STMD) Technology Demonstration Missions (TDM) Program