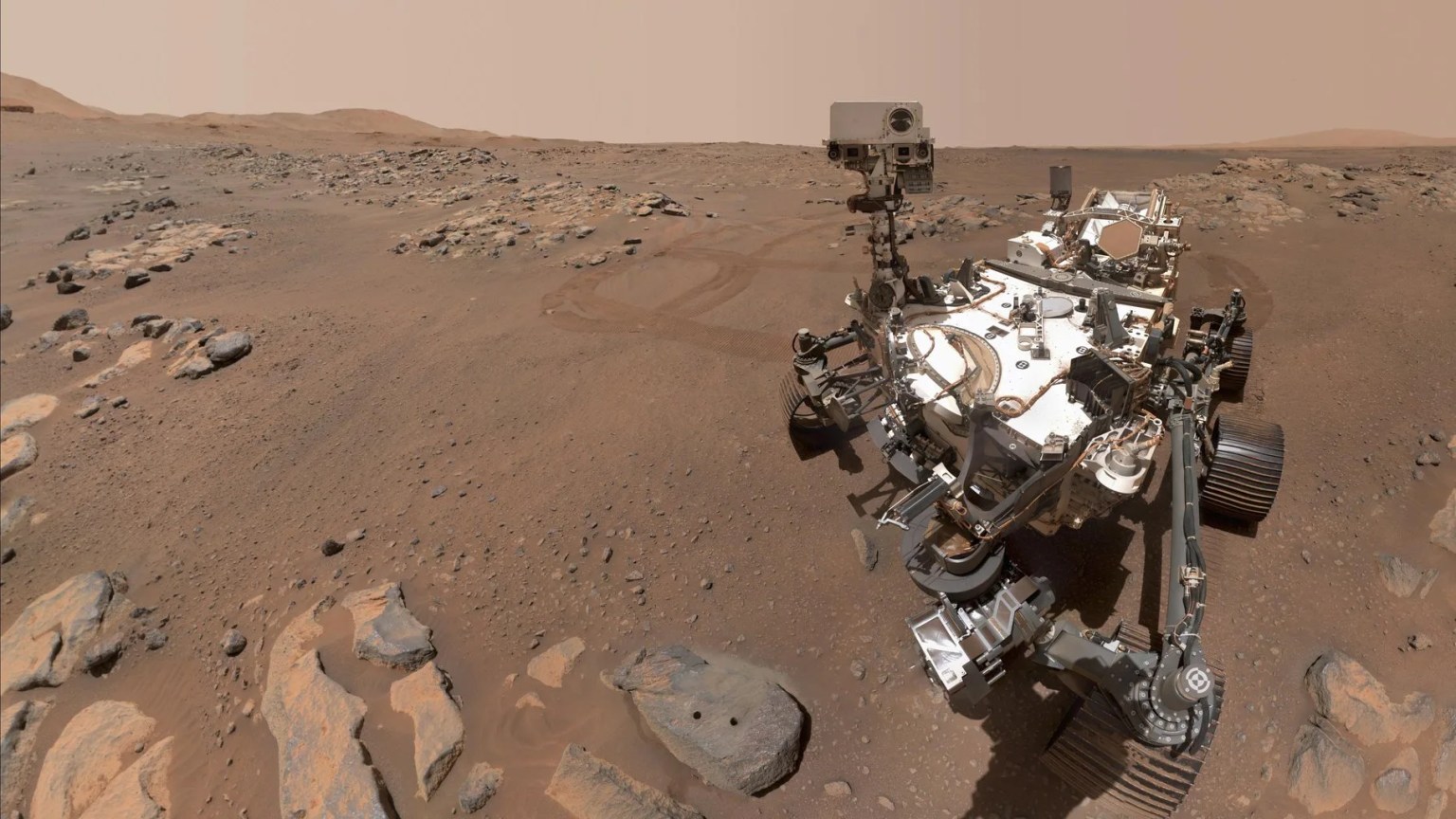





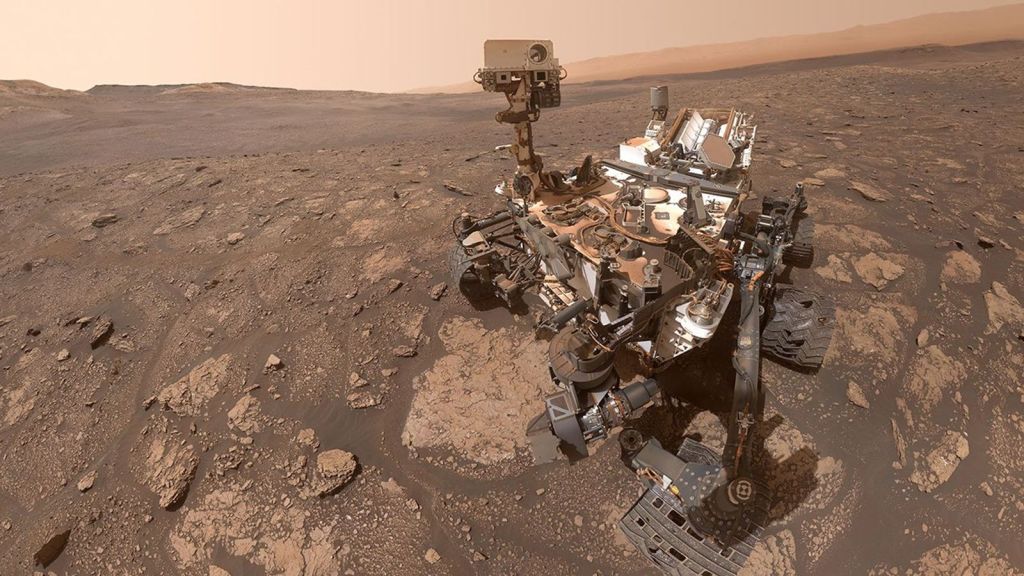









Mars 2020: Perseverance Rover
Science Instruments
Perseverance’s science instruments are state-of-the-art tools designed to acquire information about Martian geology, atmosphere, environmental conditions, and potential biosignatures.
Cameras
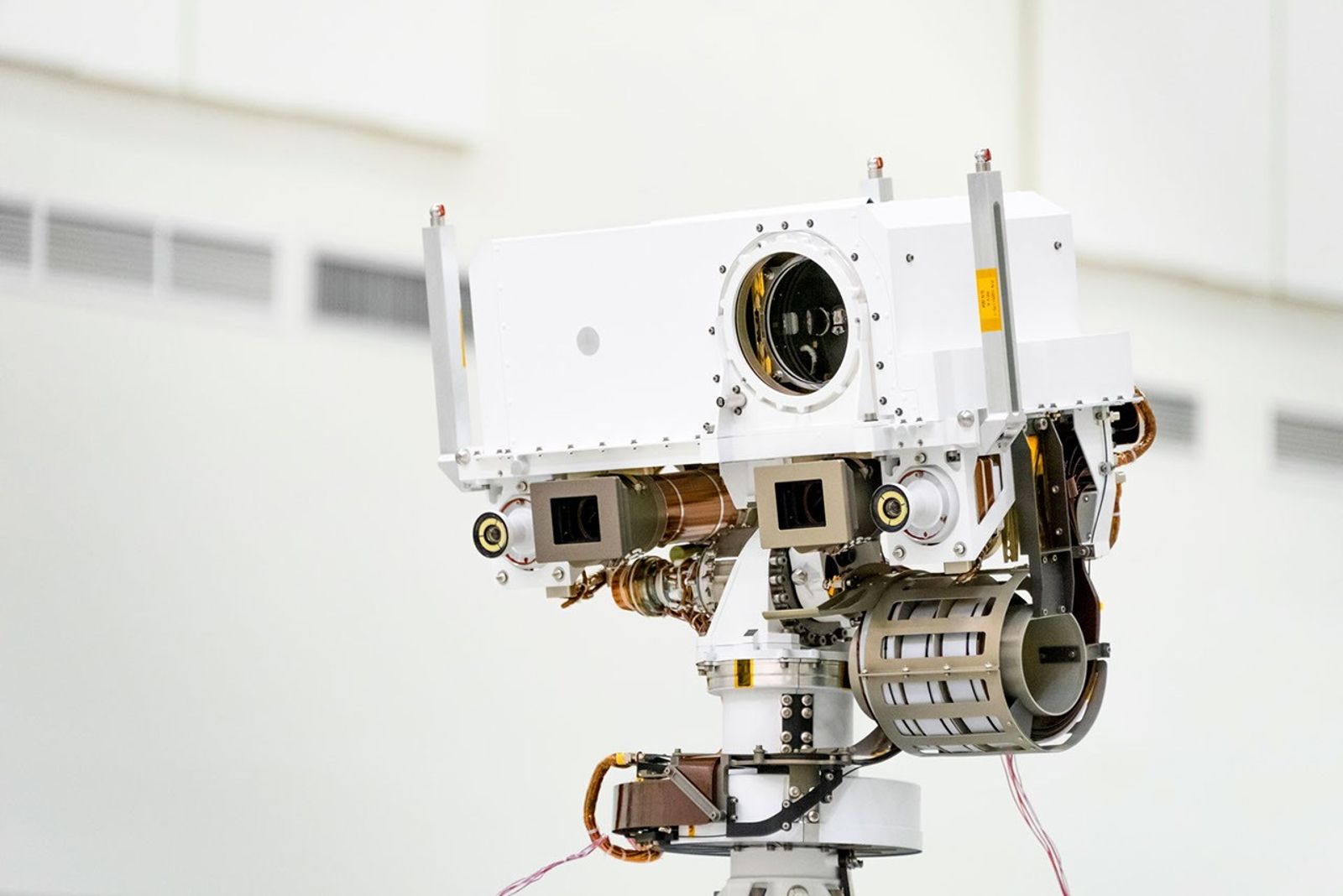
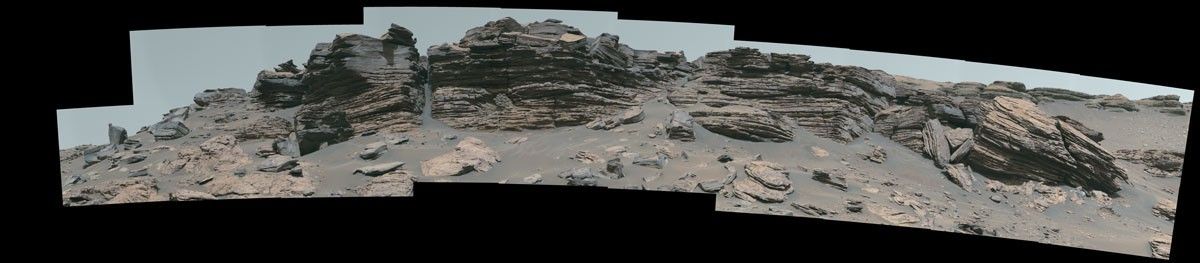
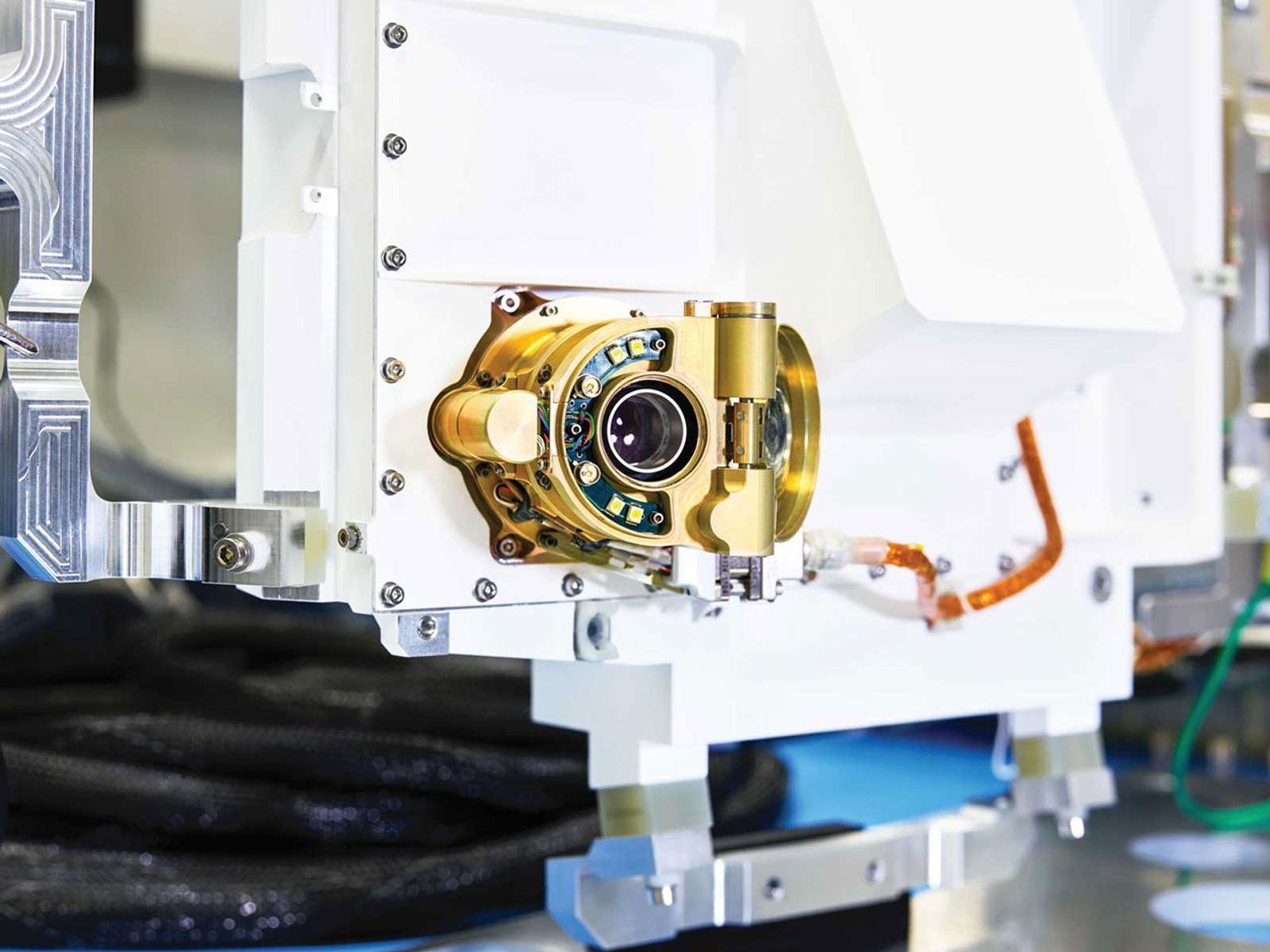
Mastcam-Z
The Mastcam-Z is the name of the mast-mounted camera system that is equipped with a zoom function on the Perseverance rover. Mastcam-Z has cameras that can zoom in, focus, and take 3D pictures and video at high speed to allow detailed examination of distant objects.

Tech Specs
| Main job | To take high-definition video, panoramic color, and 3D images of the Martian surface and features in the atmosphere with a zoom lens to magnify distant targets |
| Location | Mounted on the rover mast at the eye level of a 6 ½-foot-tall person (2 meters tall). The cameras are separated by 9.5 inches (24.2 centimeters) to provide stereo vision. |
| Mass | Approximately 8.8 pounds (about 4 kilograms) |
| Power | Approximately 17.4 watts |
| Volume | Camera head, per unit: 4.3 by 4.7 by 10.2 inches (11 by 12 by 26 centimeters) Digital electronics assembly: 8.6 by 4.7 by 1.9 inches (22 by 12 by 5 centimeters) Calibration target: 3.9 by 3.9 by 2.7 inches (10 by 10 by 7 centimeters) |
| Data return | Approximately 148 megabits per sol, average |
| Color quality | Similar to that of a consumer digital camera (2-megapixel) |
| Image size | 1600 by 1200 pixels maximum |
| Image resolution | Able to resolve between about 150 microns per pixel (0.15 millimeter or 0.0059 inch) to 7.4 millimeters (0.3 inches) per pixel depending on distance |
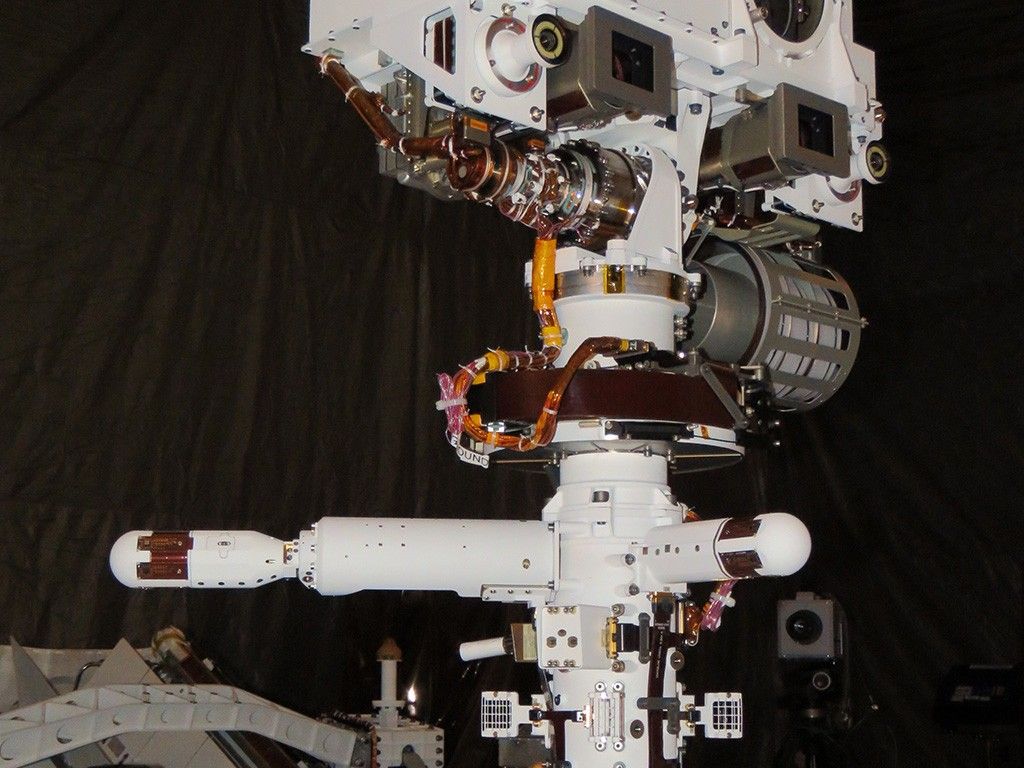
SuperCam
The SuperCam on the Perseverance rover examines rocks and soils with a camera, laser, and spectrometers to seek chemical materials that could be related to past life on Mars. It can identify the chemical and mineral makeup of areas on Mars as small as a pencil point, from a distance of more than 20 feet (7 meters). This instrument also has a significant contribution from the Centre National d'Etudes Spatiales, Institut de Recherche en Astrophysique et Planétologie (CNES/IRAP) France.
Tech Specs
| Main job | To identify the chemicals in rocks and soils, including the makeup of their atoms and molecules. |
| Location | Mounted on the "head" of the rover's long-necked mast |
| Mass | Mast-mounted sensor head: 12 pounds (5.6 kilograms) Rover body-mounted spectrometers: 10.6 pounds (4.8 kilograms) Calibration target assembly: 0.5 pound (0.2 kilograms) |
| Power | 17.9 watts |
| Volume | Mast-mounted sensor head: Approximately 15 x 8 x 6 inches (38 x 20 x 16 centimeters). Rover body-mounted spectrometers: Approximately 9 x 6 x 8 inches (22 x 16 x 21 centimeters). Calibration target assembly: 4 x 4 x 1 inches (11 x 10 x 2 centimeters); includes 36 individual targets. |
| Calibration target | 1.18 inches diameter (3 centimeters) |
| Data return | 15.5 megabits per experiment or about 4.2 megabits per day |
Spectrometer
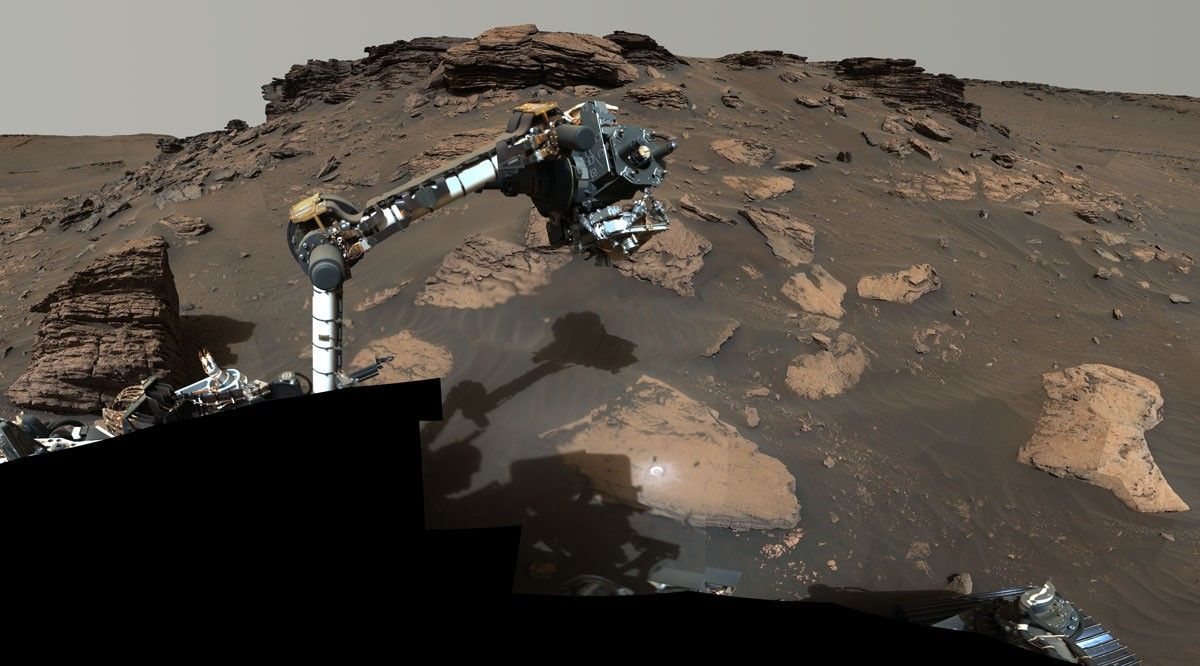
SHERLOC
Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals
Mounted on the rover's robotic arm, SHERLOC uses cameras, spectrometers, and a laser to search for organics and minerals that have been altered by watery environments and may be signs of past microbial life. In addition to its black-and-white context camera, SHERLOC is assisted by WATSON, a color camera for taking close-up images of rock grains and surface textures.
Tech Specs
| Main job | Fine-scale detection of minerals, organic molecules and potential biosignatures |
| Location | Mounted on the turret at the end of the robotic arm |
| Mass | Turret: 6.86 pounds (3.11 kilograms) Body: 3.55 pounds (1.61 kilograms) body |
| Power | Turret: 32.2 watts Body: 16.6 watts |
| Volume | 10.2 by 7.8 by 2.6 inches (26.0 by 20.0 by 6.7 centimeters) |
| Data return | 79.7 Mbits (raw) |
| Spatial resolution | 2 Cameras Autofocus and Context Imager: 10.1 micrometers WATSON Camera: 15.9 micrometers 1 Laser: 100 micrometers |
| Field of view | Imaging: 0.9 to 0.5 inches (2.3 by 1.5 centimeters) Spectroscopy: 7 by 7 millimeters (0.275 inch) |
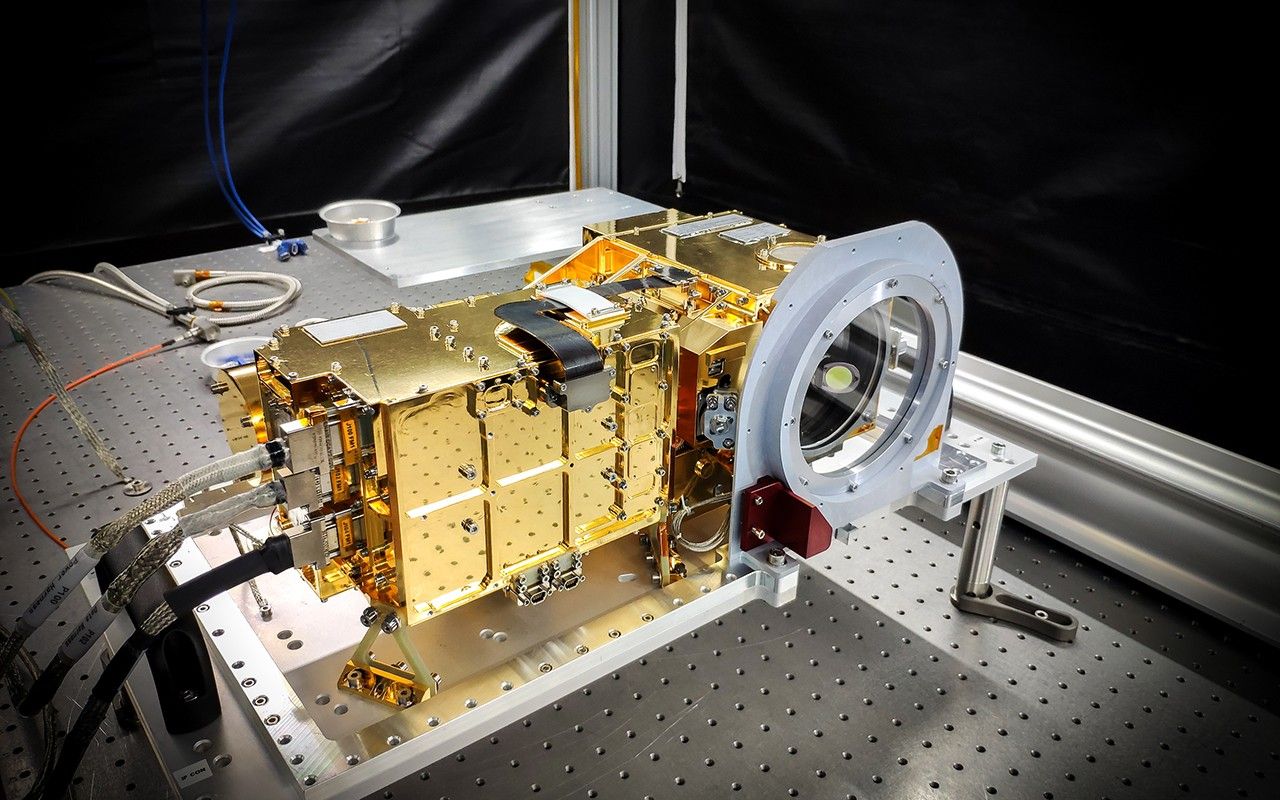
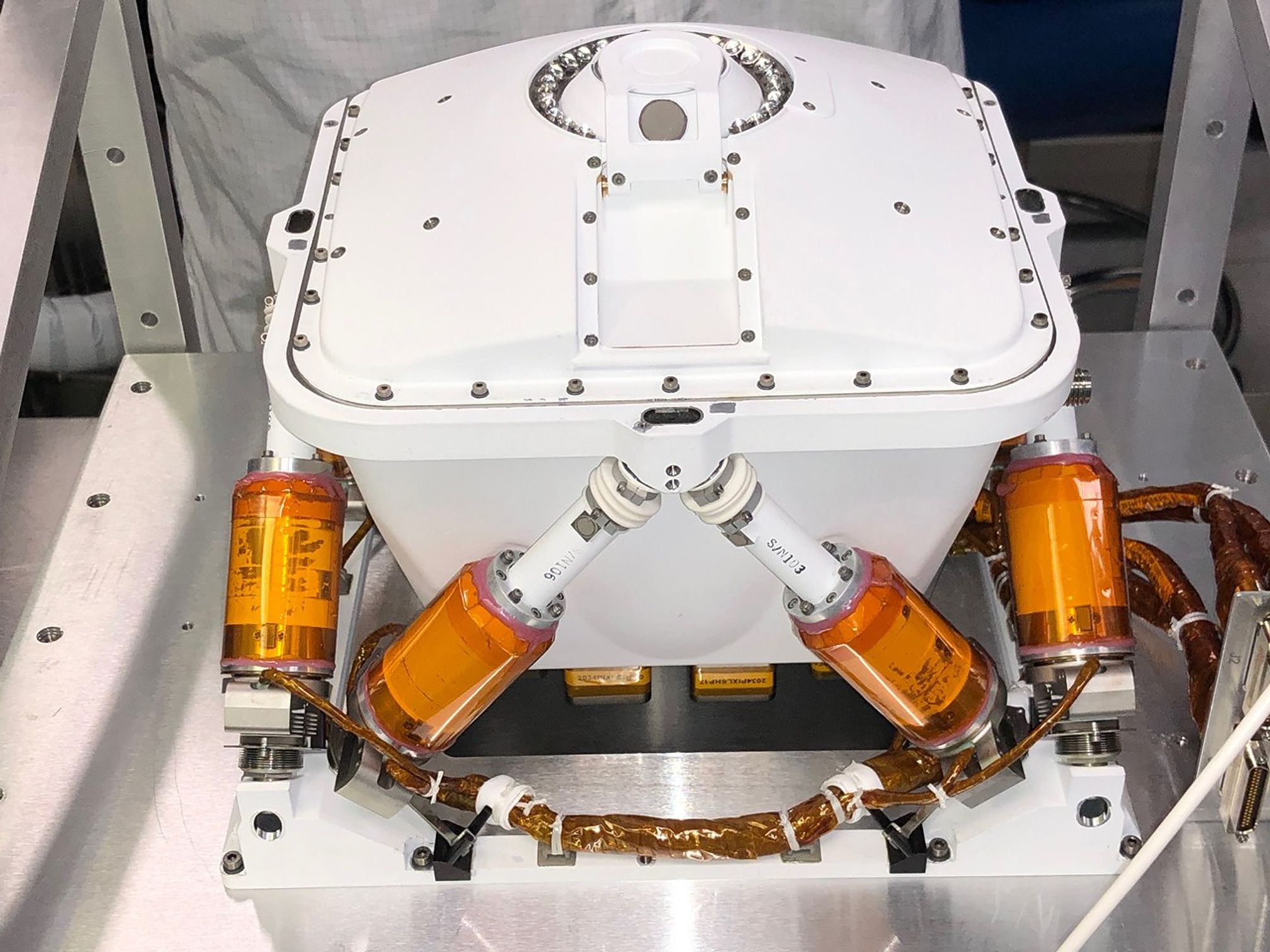
Planetary Instrument for X-ray Lithochemistry (PIXL)
The Planetary Instrument for X-ray Lithochemistry is called PIXL. PIXL has a tool called an X-ray spectrometer. It identifies chemical elements at a tiny scale. PIXL also has a camera that takes super close-up pictures of rock and soil textures. It can see features as small as a grain of salt! Together, this information helps scientists look for signs of past microbial life on Mars.
Tech Specs
| Main job | To measure the chemical makeup of rocks at a very fine scale |
| Location | Mounted on the turret at the end of the robotic arm |
| Mass | Arm-mounted sensor head: Nearly 10 pounds (4.3 kilograms) Body-mounted electronics: About 6 pounds (2.6 kilograms) Calibration target: About 0.033 pounds (0.015 kilograms) |
| Power | About 25 watts |
| Volume | Arm-mounted sensor head: approximately 8.5 by 10.5 by 9 inches (21.5 by 27 by 23 centimeters) |
| Calibration targets | Diameter of each of four disks: 0.19 inches (5 millimeters) Pedestal base: 1.53 by 1.18 inches (39 by 30 millimeters) |
| Data return | Approximately 16 megabits per experiment, or about 2 megabytes per day |
Environmental Sensors
Mars Environmental Dynamics Analyzer (MEDA)
The Mars Environmental Dynamics Analyzer is known as MEDA. It makes weather measurements including wind speed and direction, temperature and humidity, and also measures the amount and size of dust particles in the Martian atmosphere.
Tech Specs
| Main job | To measure weather and monitor dust with sensors from the surface of Mars |
| Location | Sensors are located on the rover's mast "neck" and on the deck, front and interior of the rover's body |
| Mass | Approximately 12 pounds (5.5 kilograms) for all components |
| Power | Up to 17 watts, depending on scheduled measurements |
| Volume | Air temperature sensors: Each of five sensors is 2.25 by 1 by 2.7 inches (5.75 by 2.75 by 6.75 centimeters) Radiation and dust sensor: 5.2 by 4.5 by 5 inches (13.2 by 11.5 by 12.5 centimeters) Relative humidity sensor: 24 by 4.4 inches (5.5 by 2.5 by 7.25 centimeters) Thermal infrared sensor: 2.5 by 2.25 by 2.25 inches (6.25 by 5.75 by 5.75 centimeters) Wind sensors: Wind Sensor 1 is 2 inches by 6.7 inches (5 by 17 centimeters) Wind Sensor 2 is 2 by 15.75 inches (5 by 40 centimeters) Instrument control unit and pressure sensor: 5.5 by 5.5 by 5.1 inches (14 by 14 by 13 centimeters) |
| Data return | Approximately 11 megabytes |

Mars Oxygen ISRU Experiment (MOXIE)
The Mars Oxygen In-Situ Resource Utilization Experiment, or MOXIE, is helping NASA prepare for human exploration of Mars. MOXIE tested a way for future explorers to produce oxygen from the Martian atmosphere for burning fuel and breathing.
Tech Specs
| Main job | To produce oxygen from the Martian carbon-dioxide atmosphere |
| Location | Inside the rover (front, right side) |
| Mass | About 37.7 pounds (17.1 kilograms) on Earth |
| Weight | 37.7 pounds on Earth, 14.14 pounds on Mars |
| Power | 300 watts |
| Volume | 9.4 x 9.4 x 12.2 inches (23.9 x 23.9 x 30.9 centimeters) |
| Oxygen production rate | Up to 0.022 pounds per hour (up to 10 grams per hour) |
| Operation time | Approximately one hour of oxygen (O2) production per experiment, scheduled intermittently over the duration of the mission. |
The Sound of MOXIE at Work on Mars
0:00 / 0:00
Audio of MOXIE's air compressor at work on Mars was captured by the microphone on Perseverance's SuperCam instrument on May 27, 2021, the 96th day of the rover's mission.
Radar Imager for Mars' Subsurface Experiment (RIMFAX)
RIMFAX uses radar waves to probe the ground under the rover.
Tech Specs
| Main job | To see geologic features under the surface with ground-penetrating radar |
| Location | The radar antenna is on the lower rear of the rover |
| Mass | Less than 6.6 pounds (3 kilograms) |
| Power | 5 to 10 watts |
| Volume | 7 by 4.7 by 2.4 inches (196 x 120 x 66 millimeters) |
| Data return | 5 to 10 kilobytes per sounding location |
| Frequency range | 150 to 1200 megahertz |
| Vertical resolution | As small as about 3 to 12 inches thick (15 to 30 centimeters) |
| Penetration depth | Greater than 30 feet (10 meters) deep depending on materials |
| Measurement interval | About every 4 inches (10 centimeters) along the rover track |